O
padrão IEEE 802.15.4 define um padrão para as
camadas física (PHY) e de acesso ao meio (MAC) para redes
sem fio de alcance relativamente pequeno e que também
utilizem uma menor taxa de transmissão de dados. Tudo isso
sobre pouca ou nenhuma infraestrutura, tal como pode acontecer em uma
aplicação de sensores – monitoramento
florestal, por exemplo.
A
ZigBee Alliance foi formada para
promover o padrão IEEE 802.15.4, efetuando testes sobre este
e melhorando as operações entre dispositivos de
fabricantes diferentes. Além disso, a
especificação ZigBee complementa o
padrão adicionando a este requisitos e
definições para as camadas mais altas da rede.
Suas aplicações encontram-se, tal como para o
padrão IEEE 802.15.4, em sistemas que utilizem um menor
tráfego de informações e tenham
recursos limitados, sejam estes de energia ou mesmo custo para
implementação.
As
topologias possíveis para uma rede ZigBee são
Estrela, Árvore e Malha. À partir das
definições de tipos de nós em uma
rede, segue-se:
- Estrela
(Star)
- Neste tipo de rede, apenas um dispositivo eletrônico
é o coordenador, atuando como a base da rede e podendo se
comunicar com qualquer outro dispositivo. Em nós que se
ligam a um controlador usam-se os RFDs (Reduced Function Device),
pois gastam menos bateria, podendo contudo se comunicar só
com um FFD (Full Function Device). Este tipo de rede
pode não ser o mais adequado, já que o
controlador é um ponto único de falha e assim
derruba o sistema inteiro em caso de falha nele. Encaixam-se nesta
topologia a automação residencial,
periféricos de computador pessoal, jogos e
aplicações médicas.
Figura 16 –
Topologia Estrela
- Árvore
(Cluster Tree)
- É nada mais que uma expansão do tipo estrela,
onde se substitui alguns RFDs por FFDs. Dessa forma, os dispositivos
que estão em nós mais afastados podem passar sua
informação para FFDs mais próximos,
possibilitando uma ampliação da rede.
Monitoramento e controle industrial, agrícola e
segurança podem utilizar-se deste tipo de rede.
Figura 17 –
Topologia árvore
- Malha
(Mesh)
- No tipo malha, o FFD principal é um controlador e
está conectado a FFDs configurados como roteadores. Os RFDs
se conectam a esses roteadores e a informação
será repassada para o controlador principal, com
inúmeras possibilidades de caminho entre os dispositivos e o
controlador. Assim, aumenta-se a confiabilidade na rede, pois se um
caminho estiver congestionado, pode-se usar outro. Possui um alcance
ainda mais extenso que o tipo árvore.
Figura 18 –
Topologia malha
A
implementação da tecnologia ZigBee se
dá em quatro camadas principais: física (PHY) e
de controle de acesso ao meio (MAC), contempladas pelo
padrão IEEE 802.15.4; de rede (NWK) e de
aplicação (AF). A camada de suporte
à aplicação (APS) está
incluída na AF.
- Camada
Física (PHY) – é a camada
mais baixa do protocolo. É responsável por
codificar e decodificar os bits da comunicação.
Fornece para a camada seguinte (MAC) informações
como qualidade e potência do sinal. Também
seleciona um canal dentre todos para enviar os dados.
- Camada
de controle de acesso ao meio (MAC) – logo acima da
PHY, esta define o controle de acesso ao canal de
comunicação, verificando a ausência de
tráfego antes de iniciar uma transmissão.
- Camada
de rede (NWK) – é responsável
pelo roteamento e segurança das mensagens transmitidas. As
configurações específicas da rede
também são gravadas nessa camada.
- Camada
de aplicação (AF) – possui o
código de cada aplicação da rede e
define como cada nó irá atuar (RFD ou FFD)
além de estabelecer funções de
segurança e tratamento de eventos.
- Camada
de suporte à aplicação (APS)
– faz parte do nível baixo da AF. Realiza as
ligações e a descoberta de vizinhança.
Além disso, pode modificar a rede para o tipo malha se
necessário.
Figura 19 –
Camadas de implementação de tecnologia ZigBee com
IEEE 802.15.4
Definidas
as camadas, a transferência de dados se dá,
basicamente, de três formas distintas, segundo [19]. Pode-se,
(1) enviar uma informação de um dispositivo para
um coordenador; (2) enviar do coordenador para o dispositivo ou (3)
trocar informações entre dois dispositivos
ligados ponto a ponto.
Para
a transmissão, pode ser desejável o uso de uma
mensagem de beacon. Esta tem a finalidade de
sincronizar a transmissão - ajustar para o mesmo clock,
sinalizar quais são o canal e a rede utilizados, bem como
informar o nível de sinal da conexão. Beacon
é mais utilizado para dispositivos de baixa
latência. Em redes onde não há
necessidade de suportar tais dispositivos, é usada somente
uma mensagem de beacon para a
associação da conexão e não
a todo envio/recebimento de dados.
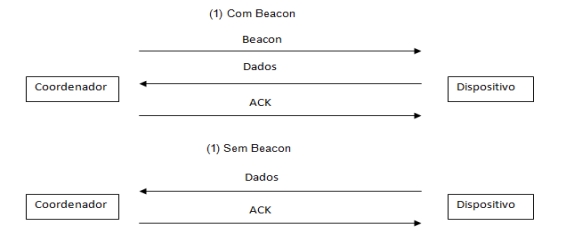
No
tipo (1) de transferência, caso seja realizado com beacon,
o coordenador o enviará para o dispositivo, atualizando a
rede. Este, por sua vez, enviará seus dados para o
coordenador, o qual responde com um “ACK”
opcional. Se não houver beacon,
o dispositivo simplesmente enviará sua
informação, podendo receber o ACK opcional.
Figura 20
– Ilustração do tipo (1) de
transferência de dados
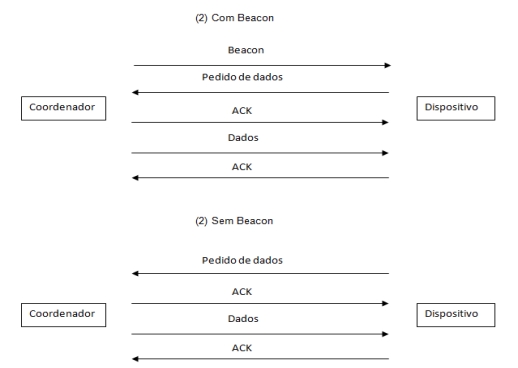
No
tipo (2), o coordenador novamente enviará o beacon,
indicando que há uma mensagem a ser enviada. Após
isto, o dispositivo responderá, pedindo o envio desta
mensagem, que será transmitida pelo coordenador logo
após este mesmo ter dado ACK para o pedido. O dispositivo,
então, receberá a mensagem e
transmitirá um ACK, informando que o recebimento ocorreu bem.
Caso
não haja beacon no tipo (2), o
coordenador irá esperar um pedido periódico de
dados oriundo do dispositivo, realizando o mesmo procedimento descrito
acima. Uma mensagem de tamanho nulo – apenas o
cabeçalho, sem conteúdo –
será enviada caso não exista mensagem para ser
transmitida.
Figura 21
– Ilustração do tipo (2) de
transferência de dados
Para
o tipo (3), os dispositivos realizarão a
comunicação entre si da mesma forma descrita
acima, sendo um emissor e outro receptor, e vice versa.
Por
fim, um gráfico [19] de alcance vs taxa
de transmissão para alguns dos protocolos explanados
até então:
Figura 22
– Gráfico de alcance vs taxa de
transmissão
Em
redes de sensores sem fio, o gráfico torna evidente o melhor
emprego do ZigBee em relação a outros, tais como
Bluetooth e Wi-Fi, devido principalmente do fato de que os sensores,
apesar de transmitirem dados a uma frequência
considerável, não o fazem com grandes volumes de
dados. De acordo com a topologia aplicada, não se faz
necessário também um alcance muito longo,
permitindo que a bateria do dispositivo tenha uma maior vida
útil.