|
Os
avanços tecnológicos das indústrias de
computação e eletrônica nos permitem,
hoje, aliar unidades de processamento de dados, armazenamento,
sensoriamento e comunicação em uma só
estrutura. Isso nos possibilita desenvolver arquiteturas
eletrônicas especiais para o uso em RSSF.
Os
grandes desafios dos pesquisadores do ramo são,
então, aliar a portabilidade e mobilidade da arquitetura com
baixo consumo energético e baixa latência e com a
máxima confiabilidade possível.
|
|
A
Rede de Sensores baseia seu funcionamento em motes
acoplados a sensores de características
específicas. Tais motes podem ser
descritos como microcomputadores de baixa capacidade computacional com
pouca memória e que devem consumir pouca energia. Cada um
desse conjunto mote/sensor é um
nó da rede.
Projetar
uma RSSF representa um desafio ao engenheiro, ao passo que ele
deverá ter a capacidade de aliar o desempenho do
nó com o tempo de vida útil da bateria.
É fundamental que haja desempenho, mas o maior problema
encontra-se na estabilidade da bateria. Isso porque substituir ou
recarregar a energia do nó pode ser muito difícil
devido à logística do mapa de sensores. E mais, a
interferência causada pelo homem (para manejar com a bateria)
no ambiente sensoriado pode, em certos casos, influenciar negativamente
nas variáveis monitoradas.
Isso
faz com que colocar a administração da energia em
primeiro plano no projeto de uma RSSF seja fundamental. Tudo o que vier
a ser criado para ser usado na rede (como a arquitetura, o protocolo,
etc.) terá uma função no controle da
bateria e em evitar desperdícios energéticos.
É
importante ressaltar que tal rede requer circuitos
específicos, projetados para aplicação
de consumo baixo energético. Um exemplo claro de
má adaptação de dispositivos
já disponíveis no mercado é o uso de
transceptores comerciais de rádio. Estes se caracterizam
pela elevada sobrecarga de energia empregada para ligá-los e
desligá-los.
A
dificuldade de planejar com certa precisão a energia gasta
por um nó está na aleatoriedade da complexidade
do ambiente a ser monitorado. Em outras palavras, fatos inesperados e o
dinamismo das condições do ambiente dificultam
que o engenheiro possa prever a vida útil da bateria.
Em
"Great Duck Island" [8], uma ilha americana no Atlântico Norte,
pesquisadores da Universidade do Atlântico em
colaboração com a Universidade da
Califórnia, Berkeley e a Intel Corp desenvolveram uma rede
composta por 32 motes. Seriam monitorados, a
temperatura, a pressão atmosférica, a umidade e o
índice de luminosidade, dentre outros fatores. Os
engenheiros, porém, tiveram “queda” de
diversos nós por não terem previsto a energia
gasta por um mote estar em modo de
comunicação sem que outro tivesse
pretensão de se comunicar.
Existem
dois tipos básicos de dissipação de
potência em nós: dissipação
estática e dinâmica. Mesmo que um nó
não esteja transmitindo ou recebendo dados, pode haver
vazamento de corrente dos circuitos digitais da fonte para o terra.
Este tipo de dissipação é
estática. A dinâmica caracteriza-se pela energia
necessária para energizar os componentes de circuito
integrado da voltagem zero para a voltagem de
operação.
De
forma abrangente, dividimos o consumo de energia de cada nó
da rede em três categorias: sensoriamento,
comunicação e processamento de dados. O sensor
varia seu consumo de energia de acordo com a complexidade de
detecção de um evento. Interferências e
a dinâmica do ambiente sensoriado aumentam a complexidade de
obtenção de dados, o que implica em maior consumo
energético. A qualidade de obtenção de
dados por parte do sensor também pode variar com o
nível de energia disponível para
colocá-lo em operação.
Em
geral, a energia utilizada em processamento de dados é menor
que a utilizada para a comunicação. Fato que fica
ainda mais evidente quando levamos em
consideração os ruídos do meio de
comunicação. Por exemplo, de [25],
interferências do tipo Rayleigh aliadas a uma perda de
potência proporcional à quártica da
distância geram um consumo equivalente entre processar 3
milhões de instruções e transmitir 1kB
a 100m.
Como
já foi dito, cada elemento que compõem a rede tem
uma função no controle energético.
Porém, existe a possibilidade de um setor da estrutura ter a
maior responsabilidade em reduzir o gasto de energia. Existem, hoje,
pesquisas sobre soluções para esse desafio com
foco em protocolo, hardware do nó,
técnicas de roteamento, dentre outros. Deter-nos-emos em
dois tipos de possíveis soluções: o
primeiro com foco em uma arquitetura a ser adicionada ao nó
e o segundo discute a possibilidade de recarga com energia solar.
|
|
Uma
arquitetura de uma rede sem fio com responsabilidade
energética baseia seu funcionamento no monitoramento
contínuo da dissipação de energia da
rede. A partir dos dados obtidos, são realizadas
as ações necessárias para que o
consumo seja o menor possível.
O
diagrama abaixo, baseado em [26], ilustra um possível
projeto para tal arquitetura.
Figura 23
–Arquitetura de administração de energia
Cada
elemento desse diagrama tem uma função importante
para o funcionamento desse conceito de arquitetura. Porém, o
Monitor de Energia tem um papel ainda mais crucial para que o projeto
seja eficiente.
Ele
baseia seu funcionamento em um Modelo de Energia e em um Mapa de
Energia. O Modelo de Energia, segundo [27], pode ser visto como um
distribuidor de energia inteligente. Ele depende de uma
bateria e de elementos consumidores. Como já foi mencionado,
o nó sensor divide seu consumo de energia entre unidades de
processamento, comunicação e sensoriamento. Cada
uma dessas unidades informa ao provedor o quanto está
consumindo, este, por sua vez, informa ao consumidor a quantidade de
energia ainda disponível. A partir dos dados
obtidos pelo Modelo de Energia em cada nó, é
possível criar um Mapa de Energia.
O
Mapa de Energia é uma representação
ilustrativa, em tons de cinza, do consumo de toda a rede.
Áreas com maior consumo, portanto menor quantidade de
energia disponível, terão uma tonalidade mais
escura, enquanto tons mais claros revelam áreas
com menor consumo, por isso maior quantidade de energia
disponível. O desenho abaixo, de [27], ilustra um Mapa de
Energia de uma rede.
Figura 24 – Mapa
de Energia de uma Rede
Esse
Mapa pode ser muito útil para que atitudes de controle sejam
tomadas para aumentar o tempo de vida útil da rede. Com
posse desses dados, é possível que se previna a
perda de nós em iminência de falha por falta de
energia. Adicionar novos nós também é
um ato facilitado, já que se procura por regiões
com quantidade suficiente de energia. O Mapa também favorece
a localização do nó soverdouro. Isso
por que a tendência é que áreas mais
próximas a esse nó dissipem mais energia em
comunicação para que os pacotes cheguem a ele.
Para aumentar a eficácia energética, move-se o
sorvedouro para a área com maior quantidade de energia
disponível.
Existem
duas formas principais para a obtenção dos dados
individuais necessários de maneira eficaz e que
não aumente consumo: Mapa de Energia baseado em
Predição e o baseado em
Agregação.
- Mapa de
Energia baseado em Predição:
Este
método, como explica [28], é inteiramente calcado
na habilidade de predição do Modelo de Energia
individual de cada nó sensor. Os dados obtidos pelo modelo
são enviados ao nó sorvedouro, que utiliza tais
informações para atualizar a quantidade de
energia disponível em cada nó. Enquanto o modelo
descrever satisfatoriamente o consumo de energia, não
é necessário enviar mais dados. Essa
predição pode ser extremamente útil
para que se evitem desperdícios em
comunicação para obtenção
de dados de cada nó.
Os
métodos probabilísticos utilizados para
viabilizar a predição, como propõem
[28], são dois: um baseado nas Cadeias de Markov e o outro
é denominado ARIMA (Autoregressive Integrated
Moving Average), discutido mais profundamente em [29], no
qual o nível de energia é representado por uma
série do tempo.
- Mapa de
Energia baseado em Agregação:
Este
modelo, abordado em [30], pode ser descrito em três etapas:
Na primeira, cada nó sensor mede sua energia local residual
continuamente. Apenas quando houver mudanças
consideráveis nos níveis de energia, o
nó enviará dados ao sorvedouro; na segunda,
disseminam-se os dados de energia pela rede. O nó
sorvedouro passa a requerer as informações
individuais através de uma mensagem enviada aos
nós. Uma técnica de
propagação da mensagem possível
é a de flooding, que pode ser descrita,
como em [31], da seguinte forma: cada nó repassa a
informação a todos o nós aos que
está ligado, menos para o nó do qual recebeu o
pacote. Isso faz com que se crie uma árvore virtual cuja
raiz é o nó sorvedouro. Após receber a
informação de requerimento de dados de energia,
cada nó envia seus dados a quem lhe enviou a
informação. Dessa forma, atualizam-se
continuamente as informações sobre os
níveis de energia da rede; na terceira etapa, destaca-se a
agregação de dados em cada nó que
recebe informações. Os dados são
agregados segundo a topologia e os níveis de energia.
Visa-se reduzir os custos da comunicação, que
como já foi dito é o maior responsável
por um alto consumo de energia.
Parte
das operações do Monitor de Energia
são respostas ao dinamismo que o ambiente sensoriado se
encontra. Isso faz com que haja uma conexão entre a
aplicação e o Monitor. Essa conexão
deve ser realizada em uma linguagem apropriada. Portanto, torna-se
fundamental a existência de um protocolo de interface com a
aplicação. Um algoritmo possível para
ser usado nessa unidade é o API (Application
Programming Interface).
Os
dados obtidos no Monitor de Energia são extremamente
importantes para que ações de controle dos
níveis de energia sejam tomadas. Essas
ações podem partir de um algoritmo automatizado
na Unidade de Administração de Energia ou de um
usuário com posse de tais dados.
A
possibilidade de haver interferência humana em alguns
processos da rede pode ser extremamente útil para reduzir o
consumo. Por exemplo, ao receber os dados do Monitor de Energia e
perceber que alguns nós estão em
iminência de falhar por falta de energia, ele pode alterar as
taxas de amostragem de dados ou fazer com que o nó apenas
armazene o que for sensoriado e não se comunique, e ao
término do período de sensoriamento os dados
seriam obtidos. Esses tipos de abordagem requerem conhecimento
científico das possibilidades de métodos de
sensoriamento. Em certos casos, por exemplo, diminuir a taxa de
amostragem pode não ser compatível com as
propostas do projeto, sendo mais aconselhável adotar outro
método. Esse tipo de procedimento é
difícil de ser implementado por meio de
inteligência artificial, por isso pode ser importante a
interferência do usuário.
O
programador se comunica com a arquitetura por meio da Unidade de
Protocolo de Interface com o Usuário (que será
abreviada por UPIU). Geralmente, o ele descreve aquilo que tem como
objetivo por meio de linguagens de programação
complexas. A UPIU deve “traduzir” aquilo que
é descrito para uma linguagem de baixo índice de
processamento. Isso por que a capacidade de processar dados de um
nó é baixa e também por que
é necessário que o consumo de energia seja o
menor possível.
Os
comandos do usuário partem da UPIU para a Unidade de
Administração de Energia (será
abreviada por UAE). Ela é a responsável por
controlar todo o consumo do nó e, por
consequência, da rede.
A
UAE deve ter a capacidade de tratar exceções
automaticamente e regular o acesso de componentes à fonte de
energia. É função da UAE viabilizar a
adaptação da rede ao dinamismo do ambiente. Novas
funcionalidades não projetadas podem fazer com que o
nó reduza seu tempo de vida útil. Por exemplo,
com a destruição (por fatores externos) de alguns
nós, outros podem ser sobrecarregados, tanto em
comunicação como em sensoriamento de dados, e
assim esgotarem seu estoque energético. O UAE
também deve ser capaz de evitar que o nó
permaneça em estado de comunicação sem
que haja pacotes a serem enviados.
Para
que UAE seja eficiente, além de receber os comandos do
usuário, ela deve obter informações
sobre as variáveis da aplicação por
meio da Unidade de Protocolo com a Aplicação e,
também, dados essenciais para o controle
automático, por parte do Monitor de Energia.
A
Arquitetura de Administração de Energia descrita
não é a estrutura completa do nó
sensor. Ela apenas descreve os circuitos e elementos fundamentais na
construção de um nó para o
funcionamento adequado da rede. Essa arquitetura é
adicionada a outras, como a de comunicação (como
o ZigBee) e a de sensoriamento ( que varia com a
aplicação).
|
|
Recarregar
as baterias dos nós da rede é uma pratica
inviável. Porém, devem existir
soluções para viabilizar um tempo de vida
útil satisfatório. Para isso, existem vertentes
científicas que estudam a possibilidade do
nó sensor ter a capacidade de se recarregar via energia
fotovoltaica.
O
sol fornece anualmente cerca de 1,5 x 1018 kWh
[32] e isso é dez mil vezes mais que todo o consumo
enérgico do homem no mesmo período. Muitas
práticas agrícolas, industriais e até
foguetes estão sendo implementadas via matriz
energética renovável – a energia solar.
A figura abaixo, de [33], revela o potencial energético de
cada região terrestre.
Figura 25-Radiação
Solar na Terra: Potencial de Energia Renovável
A
energia solar é convertida em energia utilizável
por meio de dois processos: o termoquímico e o fotovoltaico.
A discussão que se segue tem a
transformação de energia solar fotovoltaica em
eletricidade para o uso nos nós sensores como base.
Os
componentes básicos para que o funcionamento de uma unidade
de conversão fotovoltaica-eletricidade são os
fotodiodos. Eles são junções p-n
polarizadas com tensão reversa. O processo de
fabricação dos fotodiodos muito se assemelha ao
dos diodos comuns e tem o silício como seu principal
material semicondutor.
Quando
há radiação solar na
superfície do fotodiodo são criados os
‘buracos’ que se deslocam devido à
barreira potencial da junção. Isso faz com que
haja uma variação na voltagem dos terminais do
dispositivo. Esse fenômeno, o Efeito Fotoelétrico,
foi verificado primeiramente por Edmond Becquerel, em 1839.
O
fotodiodo também é conhecido como
célula. Para que ele seja eficiente, é importante
que a junção fique localizada o mais
próximo possível da superfície para
aumentar a largura da região de
depleção. Essas células
unitárias produzem, como cita [34], menos que 3W a
aproximadamente 0,5V. Abaixo, a figura, de [32], mostra o corte
transversal de uma célula em pleno funcionamento.
Figura 26-Célula
Fotovoltaica e o Efeito Fotovoltaico.
A
dificuldade em adaptar um nó sensor a captar
radiação solar e transformá-la em
eletricidade está na superfície exposta do
sensor. Esta geralmente é muito pequena, não
permitindo conexão de células em
série, e pode não estar em lugar apropriado para
o funcionamento das células.
Por
outro lado, pequenas taxas de potência transferida
são envolvidas. Nas aplicações usuais
de energia fotovoltaica, as taxas se aproximam dos kilowatts, para um
RSSF essa taxa cairia drasticamente para algo perto de miliwatts.
O
nó sensor com células fotoelétricas
deve também possuir um armazenador de energia, que poderia
ser uma bateria recarregável, e reguladores de
tensão. A necessidade de captação de
energia solar varia com a taxa de consumo do nó e com a
quantidade de energia disponível na bateria. Um
possível esquema para representar a arquitetura de
conversão é apresentado abaixo (baseado na figura
de [35]).
Figura 27-Estrutura de
Conversão de Energia Solar em Elétrica de um
Nó Sensor
Seriam
enormes as vantagens de adicionar meios de renovar a energia de um
nó sensor de maneira natural. A primeira é que
torna viável recarregar a bateria e assim estender a vida
útil da aplicação sem que haja
interferência humana no campo sensoriado.
Também seria possível garantir a qualidade dos
dados obtidos pelos sensores, já que esta pode variar de
acordo com a quantidade de energia disponível. Outro fato
importante e vantajoso para o projeto com células
fotovoltaicas é a queda que os preços desses
componentes vêm sofrendo.
Para
exemplificar, rusticamente, a quantidade de energia que estaria
disponível para um nó sensor, segue a seguinte
equação:
Onde: Eele
= Energia Elétrica Resultante (joules)
PR
= Potência da Radiação Solar (watts por
metro quadrado)
A
=Área Efetiva (metros quadrados)
t
= Tempo de Exposição (segundos)
Eefic
= Eficiência de Conversão da Célula
Fotovoltaica (porcentagem)
Escolhemos,
com base na figura 3, uma região com
radiação média de 250W/m2.
Para efeito de cálculo, a área efetiva do sensor
será 0,04m2 e ele estará
exposto 12h a radiação solar. Esse nó
contém células fotovoltaicas de
silício, o que significa que elas têm, em
média, 15% de eficiência. Logo, a energia
elétrica resultante será de:
O
número encontrado é bem expressivo. Ele
representa a energia solar convertida, por células de
silício, em elétrica em uma região do
globo com radiação média com tempo de
12h de exposição à
radiação. O nó sensor escolhido tem o
tamanho usual de 20 cm x 20 cm.
Porém,
os desafios de se utilizar de energia solar como forma de aumentar a
vida útil do sensor são grandes. A
aplicação pode não ser em um ambiente
externo, o que impossibilitaria a utilização de
células fotovoltaicas. E mesmo que seja em local com
índice de radiação solar, pode
acontecer de o nó sensor ter sua superfície
encoberta por diversas razões, como por folhas que caem
sobre o sensor. Embora esse seja um problema simples, ele
impossibilita que o sensor se recarregue via energia solar e se ele
não tiver outra forma de controle de energia
há possibilidade real que ele venha a falhar.
Outro
problema são os componentes necessários para a
utilização em nó sensores. Como
já foi dito, a estrutura de um nó requer
dispositivos específicos para tal
aplicação. O regulador, por exemplo, deve operar
com o mínimo desperdício possível e as
células devem ter a máxima eficiência,
já que não é possível
construir diversas células em série para aumentar
a taxa de conversão.
Isso
significa que, apesar de se mostrar uma solução
com diversas vantagens para o uso em RSSF, a conversão de
Energia Solar ainda não é amplamente empregada
devido à difícil
implantação da estrutura de conversão
em um nó de maneira eficiente.
|
|
Uma
Rede de Sensores sem Fio deve ser confiável e trabalhar com
restrições de latência e energia. A
latência e a confiabilidade envolvem, principalmente,
técnicas de comunicação, como
protocolos. A latência de uma RSSF é o tempo de
atraso entre o momento em que determinada ação
é sensoriada até o momento em que essa
informação é armazenada no destino -
como um IP da internet. Já a confiabilidade do sistema trata
da quantidade de pacotes transmitidos e recebidos em
relação à quantidade de pacotes apenas
transmitidos. Obviamente, quanto menor a diferença entre o
número de pacotes transmitidos e o número de
recebidos, maior será a confiabilidade do sistema.
Em
práticas de sensoriamento com fins acadêmicos,
para que o método científico seja assegurado,
é necessário que haja um limite mínimo
de pacotes a serem recebidos. Se os dados forem coletados,
porém perdidos em falhas de
comunicação, recursos de tempo e dinheiro
envolvidos e o estudo do caso terão sido em vão.
Em indústrias, máquinas podem operar fora da
margem de segurança se variáveis sensoriadas para
controle não chegarem ao destino projetado. Em praticamente
todas as aplicações de RSSF
é necessário que haja uma confiabilidade
mínima da rede.
Existe
uma dualidade no sistema de uma RSSF entre a latência e a
energia consumida. O tempo de transmissão de dados varia com
a potência da comunicação. Pode-se
atingir baixo índice de consumo energético ao se
reduzir a potência da transmissão e aumentar o seu
tempo. Isso claramente afeta a latência do sistema,
aumentando-a. Para tanto, técnicas de
modulação são amplamente utilizadas.
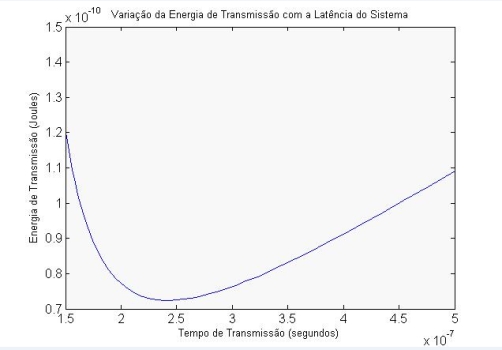
Porém,
como discute [36], a energia não decresce monotonicamente ao
passo que se aumenta o tempo de transmissão. Existe um valor
limite a partir do qual a energia tende a crescer. Isso faz com o
modelo de energia seja não-monotônico. Esse fato
é mais evidente para transmissões de curto
alcance.
Como
demonstrações, vamos considerar os seguintes
cálculos baseados em QAM (Quadrature Amplitude
Modulation), melhor abordados em [37].
Onde: τ = Tempo de transmissão (segundos)
ϒ=
Taxa de Modulação do Emissor (bits por
símbolos)
n
= Número de bits enviados (bits)
R
= Taxa fixa de transmissão de símbolos.
(símbolos por segundos)
Para
facilitar os cálculos, a energia de transmissão
será modelada como a soma de energia de saída com
a energia da eletrônica. A relação
entre a latência, τ, e a energia de transmissão fica evidente na
seguinte equação, [37]:
Onde: Etrans
= Energia de transmissão
C
= Parâmetro de qualidade da transmissão e de
potência do ruído (Joules por símbolos)
F
= Parâmetro referente ao dispositivo eletrônico
(Joules por símbolos)
Com isso, temos:
Onde: Ps=
Potência de Saída (watts)
Pe
= Potência de eletrônica (watts)
Usando
parâmetros de QAM, a potência de saída
é  . Usando dispositivos de
rádio, . Usando dispositivos de
rádio,  e e
 . Com essas
especificações, teremos . Com essas
especificações, teremos
 e e
 . .
O
gráfico abaixo revela como a energia de
transmissão pode aumentar após um valor limite.
Foi utilizado um raio de transmissão igual a 7 metros para
um modelo em que a potência decresce proporcionalmente com o
quadrado do raio de transmissão. É
fácil verificar, pelo gráfico, que o valor limite
é algo em torno de 240 ns.
Figura 28
– Gráfico da Variação da
Energia de Transmissão com a Latência do Sistema
Existem
diversas pesquisas para aumentar a confiabilidade de uma RSSF,
minimizando a latência e o consumo de energia, dentro dos
limites possíveis.
O
método [38] que se segue foi desenvolvido pela Universidade
de Berkeley e é, hoje, vendido pela empresa Dust Network.
|
|
Em
Julho de 2002 foi fundada a empresa Dust Network com objetivo de criar
alternativa para redes com máxima confiabilidade
possível e com o mínimo consumo de energia.
Abordaremos, especificamente, o protocolo TSMP (Time
Synchronized Mesh Protocol) que se destina a RSSFs.
O
protocolo caracteriza-se por ser sincronizado no tempo acurado em
aproximadamente 1 ms. Para que o consumo de energia seja o menor
possível e a rede seja eficiente, o nó A
só será “despertado” se o
nó B quiser transmitir algo a ele. Por ser uma rede
sincronizada no tempo, existe um momento esperado para que B comece a
transmitir para A, após este ter sido
“despertado”.
Figura 29 –
Diagrama no tempo de comunicação de B com A
– A espera que B transmita em TE
No
diagrama acima, TE caracteriza o momento em que A espera que B envie o
pacote. O nó A deve, então, ligar a
comunicação um pouco antes de TE para garantir,
que mesmo no pior caso de sincronização, ele
esteja “acordado” quando B transmitir. E mesmo que
ainda não tenha recebido o pacote em TE, ele deve continuar
ligado por mais um breve tempo. Isso porque B pode estar atrasado no
envio. Se após esse intervalo, A ainda não tiver
recebido nada de B, ele deve se desligar. O nó B pode
não ter transmitido corretamente ou interferências
terem corrompido a mensagem. No diagrama abaixo, o bloco verde
representa o intervalo de tempo em que A estiver ligado e pronto para
receber informações.
Figura 30 –
Diagrama no tempo de comunicação de B com A
– A “acorda” antes de TE e continua
ligado depois de TE
Vamos
considerar que B tenha algo para transmitir, porém ele
está atrasado em relação e TE. Como B
está transmitindo, A deve estender o tempo em que fica
ligado até o término da transmissão.
No diagrama abaixo, o bloco azul representa o intervalo de tempo em que
estiver transmitindo.
Figura 31 –
Diagrama no tempo da comunicação de B com A
– B começa a transmitir atrasado e A estende o
período ligado
O
nó A recebe o pacote e envia uma mensagem de
confirmação de recebimento, o ACK. Junto com o
ACK, ele envia parâmetros que auxiliam na
permanência do sincronismo. Ele envia à B a
informação de que ele estava atrasado e
quão errado ele estava. O nó B,
então, recebe o pacote. O diagrama abaixo mostra o
nó A enviando o pacote e B recebendo.
Figura 32 –
Diagrama no tempo da comunicação de B com A
– A envia ACK e B recebe
Essa
técnica faz com que um nó só esteja
com a comunicação ligada quando outro
nó tiver a intenção de transmitir algo
a ele. Isso reduz o consumo de energia de uma maneira simples,
já que é fácil desligar a
comunicação de um nó.
Para
que um nó transmita corretamente um pacote, é
necessário que ele dê início a
comunicação “acordando” o
outro nó, transmita o pacote, altere a
comunicação para modo de recebimento e, por fim,
receba a confirmação do outro nó.
O
diagrama abaixo, extraído de [38], mostra a energia gasta
para que se envie um pacote. Na abscissa, temos o tempo e na ordenada
temos a corrente que circula no nó.
Figura 33
– Gráfico da corrente versus o tempo durante a
transmissão de um pacote
Agora,
o mesmo gráfico [38], só que dividido entre as
ações durante a transmissão.
Figura 34
– Gráfico da corrente versus o tempo – O
pico de corrente é atingido durante a transmissão
A
área deste gráfico fornece a carga utilizada
durante a transmissão, já que:
Temos
que:
Quando
um nó é “acordado”,
porém nenhum outro nó envia um pacote a ele, as
ações são divididas em ligar a
comunicação e enviar, a quem o
“acordou”, a mensagem de que irá
desligar o rádio. Obviamente, como confirmado na figura
abaixo, o custo de energia desse procedimento é muito menor
do que se ele mantivesse a comunicação ligada.
Figura 35
–Transmissão ociosa
Agora
vamos discutir mais profundamente por que este protocolo ajuda a
aumentar a confiabilidade da rede
Com
a garantia de que não irá funcionar ociosamente,
o nó A pode “acordar” mais vezes do que
o nó B transmitir. Como eles são sincronizados no
tempo, cada vez que A ligar sua comunicação ele
pode se autoconfigurar em uma frequência diferente,
pois talvez a comunicação esteja com
interferências em determinado canal.
Figura 36 –
Diagrama da banda de frequência – O
nó A “acorda” em cada momento em um
canal diferente
Após
ter testado alguns canais, o nó A
“acorda” em outro e o nó B passa a
transmitir por aquela frequência. Após
receber o pacote, A envia a confirmação
à B.
Figura 37 –
Diagrama da banda de frequência – B
transmite pelo canal 4 e recebe o ACK de A
Certamente
existe um custo em consumo de energia para que um
nó “acorde” repetidamente mesmo que
não haja comunicação. Porém
é um pequeno aumento no consumo de energia em
comparação com o ganho em confiabilidade para o
sistema.
|
|
|
|
|
|