Segurança
A segurança nas redes veiculares ad-hoc são um fator relevante, pois quaisquer redes sem fio são bastante vulneráveis às invasões de intrusos maliciosos ou até mesmo grandes probabilidade de haver falta de integridade destes dados, entre os componentes que serão manuseados e mais relevantes na abordagem da segurança em VANET que se deve levar em pauta estão apresentados logo abaixo:
1) Um sistema de navegação GPS, incluindo um Receptor GPS e mapas GPS;
2) A frente da retaguarda num radar. Nós assumimos que a frente do radar omni-direcional pode detectar automóveis vizinhos na linha de visão em um raio de 200 metros.
3) Um computador central, o que irá proporcionar processamento de dados,
computação e armazenamento;
4) um transceptor sem fios, utilizando DSRC(Dedicated Short Range Communications) para
comunicações;
5) Um único ID, tais como a licenciar uma chapa electrônica que é emitido pela autoridade de registro. Nós presumimos que os veículos podem mentir sobre suas posições e GPS suas identificações exclusivas. Se um invasor muda a sua posição GPS, um posição ataque for lançado. Se um atacante forja um veículo da ID, concluímos que um ataque for lançado. Em alguns casos, uma combinação destes dois ataques podem ser lançados.Vamos combinar ações proativas e reativas utilizando em corroboração um radar para obter a velocidade relativa, ângulo e posição para o objeto alvo. Quando um observador veículo não recebe quaisquer pacotes observados a partir de um veículo em um determinado período de tempo, um tempo limite vai aumentar em um contador. Se o tempo limite do contador aumenta para além de um limiar, o veículo observador vai transmitir um sinal de radar para testar o veículo da posição observada. A detecção do radar também será desencadeada em um tempo aleatória durante o tempo em curso na comunicação com um veículo. O razão para esta última estratégia é garantir que um veículo confiável permaneça fiel ao sinal transmissor.
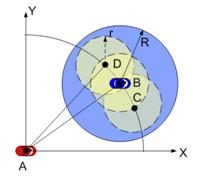
Uma vez que o GPS tem tolerância à precisão, existe uma região de valores possíveis para a verdadeira posição no GPS, conforme apresentado na figura abaixo. Da mesma forma, não tem uma região possível de dados detectado pelo radar. Se existe uma intersecção entre a posição do radar do GPS, isto significa a atual posição GPS é muito próximo do valor que for detectada por radar. Por isso, afirmam que podemos aceitar a posição do GPS.
Os veículos são agrupados em células baseado nas características do GPS local. Segurança global é baseado no fato de que os veículos na mesma cela vêem e ouve praticamente o mesmo tráfego da situação da estrada, pelo que modificação qualquer feita pelo invasor malicioso podem ser detectadas por outros veículos honestos. Estes veículos honestos, em seguida, transmitem ao registro correto e isola o veículo malicioso. Localmente garantidos posição e velocidade de informação precisa ser propagados para que outros veículos procedentes das células podem se beneficiar dele. Optamos por um roteador na célula para cada direção, que é responsável pelo encaminhamento desta informação, para minimizar colisões e uso de banda. Quando um veículo numa posição remota deve ser verificado, um pedido pode ser propagado para uma posição onde podemos utilizar o radar. O resultado é propagado de volta ao requisitante.
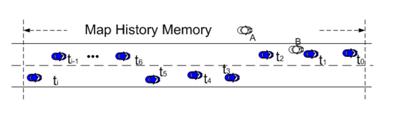
Cada veículo em uma cela conhece a posição exata de todas as veículos restantes em uma célula através de trocas de pacotes. Veículos em uma célula podem consultar a posição de um determinado veículo entre as células vizinhas. Ao receber as respostas de computação de posição dos vizinhos, o requisitante estabelece um acordo sobre todas as posições dos vizinhos. Com os dados detectados pelo radar localmente, o próximo tráfego do radar detecta os dados, que sendo moradores dos dados confiáveis em mãos, vamos aplicar sendo similaridade com estes dados. Se o valor for superior a uma similaridade limiar, aceitamos os dados, caso contrário ela é descartada. Com o aceitamento dos dados, vamos construir uma história do movimento dos veículos, ou um Mapa Histórico. O Mapa Histórico de um veículo remoto é construído na memória do observador. A idéia básica é a de que um veículo sem posição histórica não são confiáveis, assim como uma pessoa sem histórico de crédito não podem obter um empréstimo. Quando recebendo um anúncio de posição, o observador verifica o Mapa Histórico, a fim de verificar a posição baseada na consistência da circulação. Por exemplo, se uma posição computada está fora da estrada como na figura abaixo e, em seguida, baseado no Mapa Histórico, é rejeitado. Se a posição é suposto ser entre t0 - t1, mas relatórios posição B na figura, então ele é rejeitada.