Associar uma identidade a um indivíduo é chamada de identificação pessoal. O problema de
analise da identidade de uma pessoa pode ser dividido em dois tipos distintos de problemas com
diferentes complexidades: identificação ou autenticação. O cenário de identificação é
mais complexo porque além de extrair características da impressão digital é
também necessário realizar pesquisa em bases de dados, sem garantia que o
indivíduo conste na mesma. A autenticação é mais simples já que previamente é
efetuado o registro da impressão digital da pessoa e depois sempre que a
mesma pretenda ser autenticada, a sua impressão é comparada com a do
registro. Caso a semelhança entre as impressões digitais seja grande, a pessoa
é autenticada. A maioria das aplicações civis e comerciais opera neste modo.
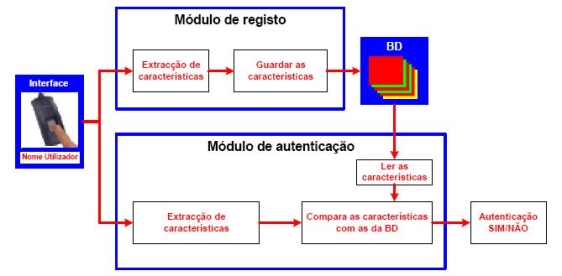
O módulo de registro registra os usuários através do seu userid e impressão
digital, sobre a qual são retiradas características posteriormente e armazenadas
em um banco de dados. O módulo de autenticação efetua a autenticação: o
usuário insere o seu userid e a sua impressão digital através de um sensor óptico.
Em seguida são retiradas características da sua impressão digital e depois são
comparadas com o registro gravado na base de dados; caso a comparação atinja
determinado grau de semelhança o acesso é concedido, caso contrário é negado.
Num sistema deste tipo existem duas métricas: FAR (False Accept Rate) que
indica a probabilidade do sistema efetuar uma falsa autenticação; FRR (False
Reject Rate) indica a probabilidade do sistema rejeitar uma autenticação válida.
Dependendo da aplicação a o foco em uma determinada métrica varia. Em alguns
casos, tais como o controle de acesso a uma área de alta segurança deverá ter o
FAR muito baixo, pois o que é importante é não conceder acesso a quem não
está autorizado. O FAR e FRR são dependentes então ao aumentar um, o outro
irá diminuir.
A autenticação de uma pessoa a partir da sua impressão digital pode ser feita
pelas rugas que a compõem e a sua orientação local, e também pelas minúcias
existentes na impressão digital, tipo de minúcia, localização e orientação. A
autenticação de pessoas através da sua impressão digital é normalmente visto
como um problema de processamento de imagem. O problema é abordado de
duas maneiras: (1) pela detecção de minúcias a qual tem como principal objetivo
identificar as minúcias existentes em cada impressão digital e efetuar alinhamento
entre duas impressões a fim de medir as suas semelhanças; (2) por textura
orientada que tira partido dos padrões que as rugas formam entre si, através de
dois parâmetros: a orientação local das rugas e a quantidade de perturbações
geradas localmente pelas minúcias existentes na vizinhança de um ponto. A
aplicação destes métodos é necessário um ponto de referência na impressão
digital, o qual é a base de partida para a extração dessas características. Existem
vários pontos que podem servir como referência numa impressão digital. Para se
definir o ponto de referência é necessário que o mesmo seja diferente do resto da
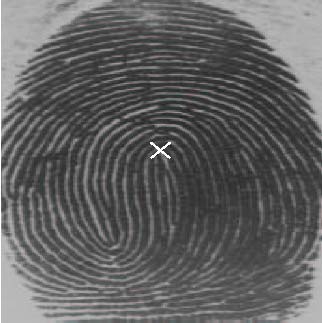
imagem e de fácil identificação. Dentre todos os pontos de singularidade
existentes numa impressão digital, o escolhido para funcionar como ponto de
referência foi o de maior curvatura côncava.
No método de detecção de minúcias, é a partir do ponto de referência que se
mede a localização de cada minúcia. No outro método, as vizinhanças são
definidas a partir desse ponto. A detecção do ponto de referência resolve o
problema de alinhamento de translação que existe na aquisição de diferentes
imagens da mesma impressão digital, sendo criando assim invariância à
translação.
3.1. Detecção do ponto de referência
A detecção do ponto de referência tem enorme importância na autenticação
porque as características são obtidas a partir da imagem dependem da sua
localização. A próxima figura mostra como elas são obtidas:
Detecção de minúcias Textura orientada
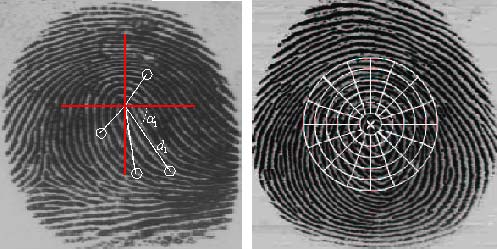
No primeiro modelo, o ponto de referência se torna a origem de um sistema de
eixos. As minúcias são caracterizadas pelo seu tipo e pela sua posição relativa ao
ponto de referência. A posição de uma minúcia é determinada pela distância d ao
ponto de referência e pelo ângulo α. A comparação entre duas impressões
digitais consiste em fazer o alinhamento das minúcias encontradas em cada
imagem. Se existir um desvio de rotação entre duas imagens da mesma
impressão digital bastará efetuar uma correção no ângulo α , até que as minúcias
presentes nas duas imagens sejam alinhadas. No segundo método a autenticação
é feita determinando uma série de características que representam a textura das
rugas segundo diferentes direções. A partir do ponto de referência são calculadas
N coroas e cada uma é dividida em x sectores originando N × x blocos. Para
cada bloco é calculado um conjunto de valores que representam o alinhamento da
textura das rugas para diferentes orientações; reunindo valores é construído o
vetor de características que descreve a impressão digital. Em seguida, comparam-
se os valores obtidos sobre a imagem do usuário de uma impressão digital com
aqueles previamente registrados. Neste método, também pode ser necessário
realizar compensação na rotação da imagem; esta é conseguida rodando o vetor
de características em torno do ponto de referência.
É necessário que o cálculo do ponto de referência tenha bom desempenho: a sua
localização deverá ser consistente em várias imagens da mesma impressão
digital, sendo invariante à rotação e translação da imagem no processo de
aquisição.
Muitas imagens são de baixa qualidade e com ruído. Tendo em vista este
problema, abaixo se apresenta um método para calcular o ponto de referência.
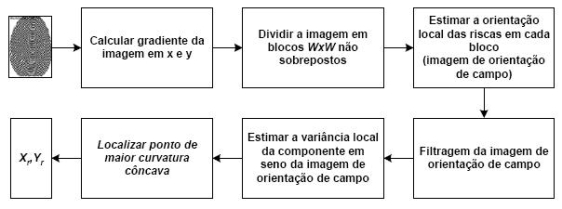
Algoritmo de cálculo
A figura abaixo apresenta o diagrama que ilustra o processo de cálculo.
Este método determina a direção das rugas.
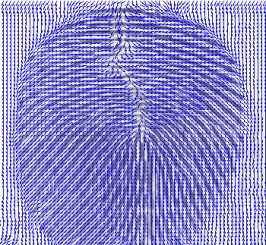
Mesmo após definir a matriz de orientação de campo, a imagem ainda aparece
muito poluída, então o próximo passo é obter a matriz O′ que representa a
filtragem de O.
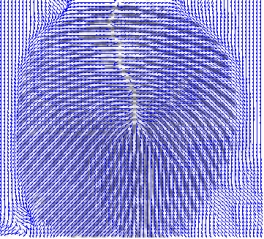
Pode-se perceber na imagem seguinte o efeito da filtragem após definição do campo direcional:
ANTES DEPOIS
Depois de obtenção do campo direcional, é feito o calcula para descobrir os pontos de referência: