|
Os dois mecanismos de acesso apresentados nas duas seções
anteriores (CSMA/CA básico e CSMA/CA com RTS/CTS) não
são determinísticos, ou seja, não garantem (com 100%
de chance) que uma estação vai conseguir acessar o meio.
Para oferecer um serviço determinístico (com retardo limitado),
o padrão suporta opcionalmente uma função de coordenação
pontual (PCF point co-ordination function) centralizada, construída
sobre a função de coordenação distribuída
(DCF). Usando PCF, um AP (Access Point) controla o acesso ao meio determinando,
em cada momento, qual estação deve transmitir. Redes Ad Hoc
não podem usar essa função, já que não
possuem um nó central controlador.
As duas funções de coordenação
pontual e distribuída são integradas com a utilização
do conceito de superquadro. Quando implementa a função de
coordenação pontual, o DFWMAC divide o tempo em períodos
denominados superquadros. Um superquadro consiste em dois intervalos de
tempo consecutivos: no primeiro, controlado pela PCF, o acesso é
ordenado (não ocorrem colisões), no segundo, controlado pela
DCF, o acesso baseia-se na disputa pela posse do meio (podem ocorrer colisões).
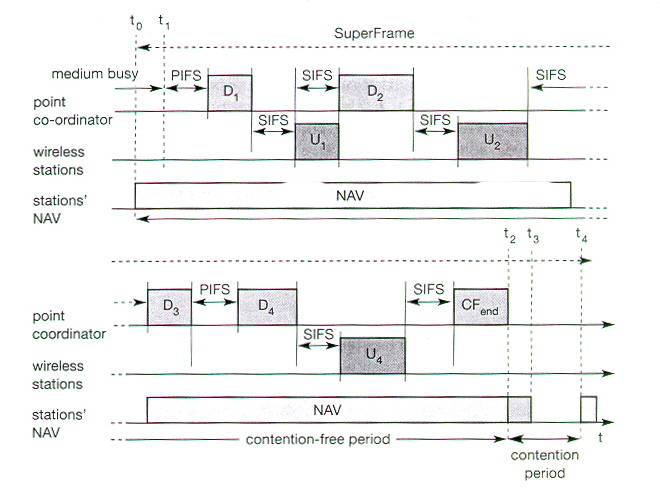
A figura abaixo mostra como são construídos os superquadros
e mostra também muitas estações (todas na mesma linha)
e os NAVs das estações (também na mesma linha).
|
|
No tempo t0, o período livre de contenção
do superquadro deveria ser iniciado, entretanto uma outra estação
está transmitindo (o meio está ocupado). Por causa disso
o PCF espera o DCF, ou seja, o início do superquadro é adiado.
A única possibilidade de evitar variações é
simplesmente não existindo nenhum período de contenção.
Depois que o meio se tornar inativo (no tempo t1), o coordenador pontual
(AP) tem que esperar por PIFS antes de acessar o meio. Como SIFS é
menor que DIFS, nenhuma outra estação consegue acessar o
meio antes do AP.
|