Desenvolver uma solução de gerenciamento para um caso em que há centenas
ou milhares de nós com características particulares não é tarefa fácil. Os três
desafios principais àconstrução de uma solução em RSSF:
- restrição de recursos
- dependência da aplicação
- influência do ambiente no comportamento da rede
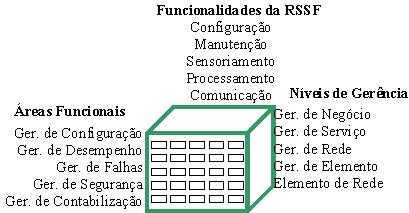
Para lidar com esta complexidade a arquitetura MANNA estudou e organizou os
vários contextos em diferentes áreas funcionais de
gerenciamento(configuração, falhas, segurança, desempenho e
contabilização) e níveis de gerência(elemento de rede, gerenciamento de
elemento de rede, gerenciamento de rede, gerenciamento de serviço,
gerenciamento de negócio). Essa arquitetura também conta com a utilização
de modelos que representam o estado da rede (mapa de energia, topologia,
conectividade, e modelos não determinísticos) e leva em conta as
funcionalidades específicas das RSSFs (estabelecimento ou configuração,
manutenção, sensoriamento, processamento, comunicação) também conhecidas
como ciclo de vida de uma RSSF.
Esse estudo deu origem a uma abstração em três dimensões como mostrado na
figura abaixo:
- Abstrações da Arquitetura MANNA -
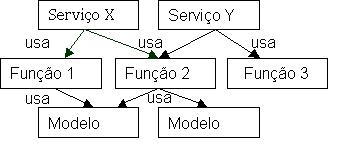
Desta forma, situações complexas do gerenciamento de RSSFs são decompostas
em sub-problemas menores. E através do uso desta organização são definidos
serviços, funções e modelos de gerenciamento. Um esquema de construção
do gerenciamento a partir da definição de serviços e funções e da utilização
de modelos é exibido na figura a seguir:
- Relacionamento entre serviços, funções e modelos na arquitetura MANNA -
Note que um serviço pode utilizar mais de uma função, dois serviços podem
especificar funções em comum, e algumas funções devem utilizar modelos para
obter informações do estado da rede sobre algum aspecto.
Alguns serviços definidos pela arquitetura MANNA são o de estabelecimento da
rede, de manutenção da rede, de processamento, de comunicação, de
segurança e o serviço de QoS (para descrição completa desses serviços
consultar a tese de referência [12]).
Algumas funções definidas pela arquitetura MANNA são: função de deposição de
nodos, configuração de parâmetros de operação da rede, estado da rede,
topologia, conectividade da rede, agregação, mapa de energia, localização
dos nodos, determinação da área de cobertura da rede, controle da
densidade de nodos, estado operacional do nodo, estado administrativo dos
nodos, estado de uso dos nodos, custo de comunicação, sincronização,
consumo de energia, nível de energia, verificação da área de cobertura da
rede, verificação do tráfego, monitoração da Qualidade de Serviço, controle
de QoS, integração com o usuário, orientação operacional, cooperação,
análise de energia, e correlação de informação (para descrição completa
dessas funções consultar a tese de referência [12]).
Alguns modelos de informações do estado da rede definidos pela arquitetura
MANNA são: área de cobertura, topologia da rede, conectividade da rede,
produção, energia residual, padrão de utilização, custo, modelos estruturais,
modelos de cooperação, e modelos não determinísticos(para descrição
completa desses modelos consultar a tese de referência [12]).
O objetivo do gerenciamento das RSSFs éestabelecer um conjunto de serviços
de gerenciamento que visem promover a produtividade da planta e dos
recursos disponíveis integrando as diferentes funções de gerenciamento e
garantindo o nível de qualidade estabelecido para os serviços providos pela
RSSF.
A partir dessa abstração a arquitetura MANNA propõe três arquiteturas de
gerenciamento:
- Arquitetura de Informação: reponsável por suprir modelos e mapas
com as informações necessárias ao gerenciamento da rede. Alguns
dos modelos definidos são mapa da área de cobertura (sensoriamento
e comunicação), topologia da rede, conectividade da rede,
produção, mapa de energia residual, padrão de utilização, custo.
- Arquitetura Funcional: proposta para planejar entidades de
gerenciamento (gerentes e agentes), serviços e funções. As
informações necessárias para realizar os serviços são obtidas da
arquitetura de informação.
- Arquitetura Física: define como a informação de gerenciamento é
trocada entre as entidades de gerenciamento. Pode ser vista como a
implementação da arquitetura funcional. A arquitetura física é
dividida em camadas:
- camada de aplicação: consiste nos protocolos de
gerenciamento e consulta da RSSF. Alguns deles são SNMP –
Simple Network Management Protocol; CMIP – Common
Management Information Protocol; WBM – Web Based
Management; ANMP – Ad- hoc Network Management Protocol
- camada de transporte: para todos os protocolos descritos na
camada de aplicação a recepção correta dos dados das
mensagens não é assegurada numa RSSF. Entrega confiável de
dados ainda é uma questão de pesquisa em RSSF.
- camada de rede: deve ser projetada considerando eficiência
energética, e que RSSFs são centradas em dados.
- camada de enlace: responsável pelos quadros de transmissão
de dados, controle de acesso ao meio (MAC) e controle de
erro. Na maioria das vezes é usado o protocolo CSMA/CA
como controle de acesso ao meio.
- camada física: responsável pela seleção de frequência de
transmissão, geração da portadora, detecção de sinal,
modulação, e criptografia de dados.