|
VANETs e sua
possibilidade de comunicações entre veículos facilitaria o avanço dos ITS, além
de atingir ainda o consumidor final.
No entanto, a
realização de tais redes está ligada à necessidade de disseminação de dados,
seja em arquiteturas puramente ad-hoc ou híbridas. A disseminação de dados deve
atender às demandas, enviando a informação àqueles que a desejarem, enquanto
atende a certos objetivos, como alta taxa de dados.
2.1 DSRC
DSRC é a sigla
para Dedicated Short Range Communications, Comunicações Dedicadas em
Curto Alcance, protocolo desenvolvido para oferecer comunicações entre veículos
e entre veículos e equipamentos de acostamento. O uso mais conhecido de DSRC é
no pagamento eletrônico de pedágios e de estacionamentos. Todavia, o futuro
almeja aplicações mais ousadas, tais como evitar colisões (acidentes
automobilísticos), avisar aos motoristas quando ambulâncias estão se
aproximando (para que abram caminho), inspeção de segurança em veículos.
O protocolo
possui alta taxa de dados, de até 27Mbps, em alcance de até 1km, num padrão
multicanal baseado no IEEE 802.11/802.11a e já opera nos EUA em um espectro
licenciado de 75MHz em 5.9GHz pelo governo, para aplicações em ITS, Intelligent
Transport Systems.
Embora baseie
sua camada física no IEEE 802.11a, DSRC diferencia-se deste sobretudo por
operar numa banda já dita licenciada, além de permitir aplicações adaptadas a
altas velocidades de veículos (até 190km/h) e 7 canais de 10MHz cada dando
suporte a aplicações seguras e não seguras.
A banda de
5.9GHz consiste de sete canais de 10MHz que incluem um controle de canal e seis
controles de serviços. DSRC, que envolve comunicações V2V (Veículo para
veículo) e V2R (Veículo para infra-estrutura de acostamento), deverá suportar
aplicações seguras e não-seguras. No entanto, a prioridade é dada às aplicações
seguras, uma vez que o uso da banda de 5.9GHz pelas aplicações não seguras
seria inapropriado se isto conduzir a uma depreciação de performance das
aplicações seguras. Isto se deve ao fato de que supõe-se que aplicações seguras
em VANETs devam ser as responsáveis por assegurar vidas, alertando os
motoristas de condições impróprias de direção. Assim, o tempo de resposta e
confiança são requisitos básicos em aplicações seguras.
A camada física
do DSRC usa modulação OFDM (Orthogonal frequency-division multiplexing)
para multiplexação de dados.
A descrição de
um quadro de dados da camada física DSRC:
A1-A10 são dez símbolos
de treinamento idênticos de 2 bytes, cada um com 16 amostras. Um subconjunto
destes símbolos é usado para detecção de dados, ganho de controle automático e
várias outras combinações. Os demais símbolos de treinamento são usados para
estimativas de offset (distância) de freqüências inferiores e estimativas de
sincronização de símbolos inferiores. Os símbolos de treinamento são seguidos
de dois símbolos de treinamento de 4 bytes, C1 e C2, usados para estimativas de
canal e sincronia de símbolos e freqüências superiores. C1 e C2 têm, 64
amostras, e CP1, de 32 amostras, é o prefixo cíclico que executa proteção
contra interferência inter-símbolos (distorção do sinal recebido). Após os
símbolos de treinamento, seguem-se os símbolos OFDM modulados. O primeiro
símbolo OFDM é o cabeçalho da camada física, modulado por BPSK, e que
especifica o tipo de modulação usado nos símbolos OFDM.
Cada símbolo
OFDM consiste de 64 amostras e um CP de 16 amostras pré-anexado para cada
símbolo OFDM, para combater interferência inter-símbolos.
Transmissor DSRC
Figura 1. Transmissor DSRC
(adaptado de [1])
O fluxo de dados de entrada primeiro é embaralhado
através de uma seqüência de bits pré-definida aleatória. Os dados embaralhados
são codificados usando convolução de 64 estados e taxa ½.
Depois de
codificados, os dados seguem para um arranjador de blocos. O arranjador
redistribui os bits transmitidos em tempo e freqüência de forma tal que erros
de quebra de bits contínuos tenham pouco impacto na performance do decodificador
de convolução. Um padrão desejável de arranjador depende das características do
canal. Por exemplo, usando um arranjador sob AWGN (Ruído Branco Gaussiano
Aditivo), o canal não aumenta a performance do sistema. Para um sistema fechado
típico, o canal pode ser caracterizado como um canal seletivo de baixas
freqüências. Devido à baixa mobilidade, o tempo de coerência do canal é
geralmente muito maior do que a duração do pacote transmitido.
Após o arranjo, os
bits são mapeados em símbolos de acordo com diferentes tipos de modulação. Uma
Transformada Rápida Inversa de Fourier é aplicada nestes símbolos modulados, e
os símbolos são portados em um conjunto de sub-portadoras ortogonais. Um
prefixo cíclico (ou intervalo de guarda) é inserido antes de cada símbolo OFDM
para prevenir interferência inter-símbolos gerada pelo canal, e preâmbulos
curtos e longos são inseridos no começo do pacote, que agora está pronto pra
transmissão.
2.2 VITP
VITP, Vehicular
Information Transfer Protocol, é um protocolo de aplicação que especifica a
sintaxe e semântica de mensagens de consultas sensíveis a local entre nós de
VANETs. É uma proposta feita por Dikaikos et al no 2nd ACM
international workshop on VANETs.
Entende-se por
sensível a local a possibilidade de fornecer explicitamente a localização da
demanda. No escopo de veículos, que têm movimentação limitada às malhas
rodoviárias, pode-se assumir que estas são o domínio geográfico a ter
sensibilidade estudada.
Um cliente VITP
instalado em computadores embarcados em carros modernos seria responsável por
gerenciar o funcionamento do protocolo.
Um esquema de
codificação de localidades organizaria e representaria simbolicamente segmentos
rodoviários. Este esquema possibilitaria as consultas sensíveis a local, e pelo
suporte de outros protocolos geográficos, que fazem uso de serviços onboard para
transformar as representações simbólicas em coordenadas GPS.
Propõe-se
características no protocolo que permitam otimizações de performance (caching
de mensagens, redução de tráfego VITP), assegurar qualidade para resultados
VITP e a proteção da privacidade dos motoristas.
Diferentemente
dos sistemas de monitoração atuais, baseados em disseminação contínua de
condições de tráfego via VANET, VITP propõe recuperação de tráfego em empuxe (pull-based),
acionado por demanda de consultas sensíveis a local feitas por veículos munidos
de VITP. O protocolo se propõe ainda a propagação de mensagens por empurro (push-based),
mecanismo de disseminar vários alertas que carregam informação sobre emergências
e outras ocorrências nas condições normais de tráfego.
Como a
centralização de servidores de dados em redes móveis, em especial veiculares, é
inviável custo e escalabilidade o VITP não assume nenhuma infra-estrutura
além de veículos e equipamentos de acostamento. Assim, o servidor que fornece
respostas a consultas VITP é uma coleção dinâmica de clientes VITP, que ora
constituem um veículo que se locomove dentro da área de localização do alvo da
consulta, ora é um veículo capaz de contribuir com o resultado da consulta a
partir de informações armazenadas na memória local dos seus dispositivos
embarcados. Essa coleção de veículos se estabelece de forma ad-hoc, e depende
da VANET constituída na região entre a consulta e seu resultado. À alocação dinâmica
de usuários de VITP que estão na localização-alvo de uma consulta VITP e
influenciam no diagnóstico desta, chama-se Virtual Ad-Hoc Server, VAHS.
Note que esta coleção de clientes VITP constituirá uma estrutura de
melhor-esforço. Ou seja, não fornecerá garantias da recuperação de mensagens
perdidas. Ainda, um cliente VITP que se junte ao VAHS não tem informações sobre
outros membros do grupo; Um veículo pode adentrar um VAHS, participar da
computação de um diagnóstico e abandonar o grupo antes da complementação da
resolução da consulta. Por sua vez, o VAHS também não mantém conhecimento
explícito de seus membros. É identificado tão somente por uma consulta e a
localização-alvo, e não pelos clientes VITP que dele participam.
Transação VITP
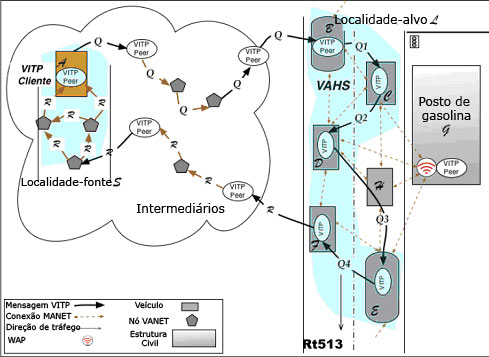
Figura 2. Transação VITP (Adaptado de [6])
A figura acima
mostra uma transação VITP. Ela é iniciada pelo veículo A, que está no segmento
rodoviário S e pede informação sobre a velocidade média de pelo menos quatro
veículos dentro do segmento L, para estimativa de condições de tráfego lento em
L. Para tal, o veículo A envia um pedido Q com sua assinatura. Assume-se que S
e L estão conectadas por uma VANET.
A transação
consiste, assim, de quatro fases:
1.
Envio da consulta Q é transportada pela VANET até a
localização-alvo L. Q passa por nós intermediários da VANET, as quais empurram
a mensagem até seu destino usando roteamento geográfico. Os nós intermediários
não precisam ser um cliente VITP: Apenas aqueles que processarão o diagnóstico
precisam sê-lo. Os intermediários apenas encaminham a mensagem até L.
2.
Computação VAHS É a fase que se inicia quando Q chega
a um cliente B que está na região L e deseja participar de um VAHS para
resolver Q. Nesta fase, a consulta VITP é roteada entre os clientes VITP do
VAHS. Estes modificam a consulta para indicar que ela é parte de uma computação
VAHS (esta modificação acontece apenas quando Q está no primeiro cliente que
adentra o VAHS) e multiplexar resultados parciais da consulta. Por exemplo,
quando B recebe Q, resolve-a, extrai a informação pedida de seu sistema de
diagnóstico, reescreve a consulta para armazenar nela o resultado parcial e
indicar que a consulta é agora parte de uma computação VAHS. A seguir, passa a
mensagem adiante. A semântica da consulta indicará como a rede tratará a consulta
reescrita (se enviará unicast ou multicast a seus vizinhos). A consulta é
repassada entre clientes do VAHS até que alguma condição de retorno seja
satisfeita. O cliente VAHS que detectar uma dessas condições cria uma resposta
VITP e a encaminha até a região-fonte S, através da VANET.
3.
Envio de resposta Inicia-se quando a resposta VITP
chega a S. A rede envia a resposta em broadcast aos nós de S, para que possa
ser recebida pelo nó A. Quando é o caso em que o veículo consultor já deixou a
área inicial onde se encontrava, o VAHS pode especificar uma região estendida
na qual a resposta deve ser enviada por broadcast.
Condições de retorno
Um detalhe
importante da fase de computação VAHS é especificar quando se dão as condições
de retorno que engatilharão a fase de envio da resposta.
No caso da
figura, por exemplo, supõe-se que A procurava um posto de gasolina em L. Quando
o pedido chega ao posto de gasolina G, o cliente modifica o pedido para fase de
computação, resolve a consulta, detectando que há ao menos um posto de gasolina
em G, e decide que pode resolver a consulta e que a condição de retorno está,
portanto, satisfeita. Assim, uma mensagem de resposta VITP é criada com as
coordenadas e preços de G, e enviada por broadcast a S.
Por outro lado,
se A procura por preços de mais de um posto em L, o cliente em G
começará a fase de computação VAHS, reescreverá a consulta e tentará passá-la
adiante, em busca de outros postos: Ainda não foi satisfeita uma condição de
retorno. Caso não haja outros postos de gasolina em G, nem sequer será possível
satisfazer uma condição, e A não receberá nenhuma resposta. Para lidar com
estes casos, VITP suporta uma condição de retorno alternativa, que é
restringida pelo tempo em que uma infra-estrutura pode passar fazendo
determinada computação VAHS.
2.3 PAVAN
PAVAN é um protocolo de
monitoramento de disponibilidade de conteúdos de mídia, projetado para
entretenimento intraveicular, em dispositivos C2P2 (Car-to-Car / Peer-to-Peer),
sistemas de entretenimento que complementam as redes multimídia cabeadas
existentes nos veículos. É uma proposta de Ghandeharizade et al, em
artigo submetido ao 1st ACM international workshop on VANETs, 2004.
Dispositivos C2P2 podem formar uma rede
ad-hoc para troca de áudio e vídeo, para aplicações como vídeo sob demanda. Um
sistema C2P2 pode atuar sob três papéis, simultaneamente: Pode exibir um título
(de conteúdo de mídia); pode fazer streaming de um clipe armazenado
localmente para outro dispositivo C2P2; por fim, pode rotear dados entre dispositivos
C2P2.
A precisão do
PAVAN está relacionada às entradas fornecidas. Três informações essenciais
podem ser fornecidas:
·
Tabela de replicação de títulos - Baseada em dados de
entrada regionais e globais, com identificação e nível de replicação dos
títulos, seria composta de I linhas, uma para cada título
·
Tabela de mobilidade regional Células (nós) agrupados
podem formar um mapa regional (matriz). Uma estação base (de acostamento)
monitora os dispositivos C2P2 em sua célula e utiliza as informações para
construir uma tabela de mobilidade intercelular Markoviana. O modelo de
mobilidade assume que, em cada instante de tempo discretizado, um C2P2 pode se
locomover para um de seus oito vizinhos ou permanecer no mesmo ponto.
·
Tabela look-ahead regional É criada para mostrar
disponibilidade dos títulos. A tabela tem R entradas, cada uma com I + log ( C
) bits de informação, onde C é o número máximo de C2P2s em uma célula.
Pode-se ainda
fornecer o atraso máximo aceito por um cliente.
Em sua forma
mais simples, o PAVAN pode utilizar apenas a tabela de replicação global para
produzir a saída para o usuário, composta da lista de títulos. Com base nesta
tabela e em um limiar x, o protocolo decide que títulos estão disponíveis para
um cliente. Se o grau de replicação de um clipe i for maior que x, o clipe
estará disponível, e indisponível caso contrário. O valor x é um percentual.
É possível
refinar buscas com modelos de mobilidade fornecidos ao PAVAN, capturando as
rotas de locomoção dos dispositivos C2P2. O modelo de mobilidade usado é
probabilístico e Markoviano. Cada célula do mapa constitui um estado. Uma
transição entre dois estados é independente do histórico prévio de um C2P2 no
estado inicial da transição. A agregação de transições de cada célula (estado)
para todos os outros estados dá a matriz de probabilidade de transições Q = [qij], onde cada
termo é a probabilidade da transição do estado i para o estado j. Usando
cadeias de Markov torna-se possível estimar a distribuição de probabilidades
dos diferentes estados.
Assim, o modelo
de mobilidades passado ao PAVAN é ora de prognóstico, quando a matriz Q é usado
em cada passo, ora é estado variável, quando apenas as probabilidades de
equilíbrio, calculadas resolvendo Π
= Π * Q (onde Π é o vetor que representa as probabilidades de estar
em cada estado), são usadas.
Os dados de
resposta do PAVAN ao usuário são uma lista de títulos mostrada em um menu que
exibe títulos que ficarão disponíveis, bem como o tempo estimado para que
ocorra a disponibilidade (tempo de latência).
|