(continuação-2)
![]()
1.3 Protocolo
MAC do Padrão IEEE 802.11
Além de definir um mecanismo para transmissão física usando radiofreqüência ou infravermelho, o IEEE definiu um protocolo de acesso ao meio (subcamada MAC do nível de enlace de dados), denominado de DFWMAC (Distributed Foundation Wireless Medium Access Control), que suporta dois métodos de acesso: um método distribuído básico, que é obrigatório; e um método centralizado, que é opcional, podendo esses dois métodos coexistir [IEEE802.11a], o protocolo de acesso ao meio das redes 802.11 também trata de problemas relacionados com estações que se deslocam para outra células (roaming) e com estações perdidas (hidden node).
O método de acesso distribuído forma a base sobre a qual é construído o método centralizado. Os dois métodos, que também podem ser chamados de funções de coordenação (Coordination Functions), são usados para dar suporte à transmissão de tráfego assíncrono ou tráfego com retardo limitado (time bounded).
Uma função de coordenação é usada para decidir quando uma estação tem permissão para transmitir. Na função de coordenação distribuída (Distributed Coordination Functions - DCF), essa decisão é realizada individualmente pelos pontos da rede, podendo, dessa forma, ocorrer colisões. Na função de coordenação centralizada, também chamada de função pontual (Point Coordination Function - PCF), a decisão de quando transmitir é centralizada em um ponto especial, que determina qual estação deve transmitir em que momento, evitando teoricamente a ocorrência de colisões [Soares95]. Em todos os métodos de acesso, há diversos parâmetros importantes para controlar o tempo de espera antes do acesso ao meio. A figura 2.4 mostra três diferentes parâmetros que definem as prioridades de acesso ao meio. O meio, como mostrado, pode estar ocupado ou disponível; podendo ser ocupado de diversar maneiras, por exemplo, quadros de dados, ou quadros de controle. Durante o período de disputa, vários nós tentam acessar o meio. Seguem detalhes do funcionamento dessas duas funções:
O mecanismo básico do controle de acesso DFWMAC é ilustrado na Figura 2.4, nela podemos observar que uma estação, com quadros para transmitir, deve sentir o meio livre por um período de silêncio mínimo, IFS (Inter Frame Space), antes de utiliza-lo. Utilizando valores diferentes para esse período. O DFWMAC define três prioridades de acesso ao meio[Soares95]:
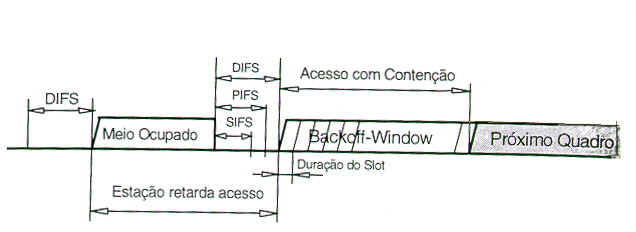
Figura 2.4 - Método de acesso CSMA/CA[Soares, Pág 276]
·
Distributed Inter Frame Spacing (DIFS) – espaço entre quadros da DCF
(Função de Coordenação Distribuída),
este parâmetro indica o maior tempo de espera, portanto a menor prioridade; ele monitora o meio, aguardando
no mínimo um intervalo de silêncio para transmitir os dados.
· Priority Inter Frame Space (PIFS) – espaço entre quadros da PCF (Função de Coordenação Pontual), um tempo de espera entre o DIFS e o SIFS (prioridade média) , é usado para o serviço de acesso com retardo, ou seja um ponto de acesso controlando outros nós, so precisa esperar um tempo PIFS para acessar o meio.
· Short Inter Frame Space (SIFS) – é usado para transmissão de quadros carregando respostas imediatas (curtas), como ACK que possuem a mais alta prioridade.
1.3.1 Função de Coordenação Distribuída
(DCF)
Representa o método de acesso básico do protocolo DFWMAC. É uma função conhecida como CSMA/CA (Carrier Sense Multiple Access / Collision Avoidance) com reconhecimento. A DCF trabalha semelhantemente a função CSMA/CD da tecnologia de rede local cabeada (Padrão Ethernet 802.3), apenas com uma diferença: o protocolo CSMA/CD do Ethernet controla as colisões quando elas ocorrem, enquanto que o protocolo CSMA/CA do padrão sem fio apenas tenta evitar as colisões. A utilização dessa função distribuída é obrigatória para todas as estações e pontos de acesso (APs), nas configurações Ad Hoc e com infra-estrutura, e ela, a DCF, trabalha da seguinte maneira, quando uma estação deseja transmitir [Soares95]:
· a estação sente o meio para determinar se outra estação já está transmitindo.
· se o meio estiver livre há pelo menos um intervalo de tempo DIFS, a estação transmite seu quadro imediatamente, caso contrário, ela aguarda DIFS novamente, cada estação escolhe um tempo aleatório de retirada (Back-off time) e atrasa esse tempo aleatório sua tentativa de acesso ao meio. Se ao terminar seu tempo de back-off a estação encontrar o meio livre, ela transmitirá.
. Esse tempo de back-off é escolhido por cada estação respeitando um limite máximo, que pode variar de acordo com a carga de utilização da rede. Se a rede está muito carregada, esse limite máximo para o tempo de retirada vai dobrando a cada colisão até chegar ao limite máximo de 255 ms. Quando a rede está pouco carregada, esse limite permanece baixo, 7 ms, diminuindo assim os atrasos. É óbvio que quanto menor o limite, maior é a probabilidade de duas estações escolherem tempos de back-off iguais, provocando uma colisão.
· após cada transmissão com ou sem colisão, a rede fica em um modo onde as estações só podem começar a transmitir em intervalos de tempo a elas pré-alocados.
· ao findar uma transmissão, as estações alocadas ao primeiro intervalo têm o direito de transmitir. Se não o fazem, o direito passa as estações alocadas ao segundo intervalo, e assim sucessivamente até que ocorra uma transmissão, quando todo o processo reinicia.
· se todos os intervalos não são utilizados, a rede entra então no estado onde o CSMA comum é usado para acesso, podendo dessa forma ocorrer colisões.
No método CSMA/CA pode ocorrer colisões e esse método não garante a entrega correta dos dados. Com isso, uma estação após transmitir um quadro, necessita de um aviso de recebimento (ACK) que deve ser enviado pela estação destino. A estação de destino envia o sinal de recebimento após esperar apenas por um tempo SIFS, logo, nenhuma outra estação acessará o meio ao mesmo tempo causando uma colisão. Lembremos que cada estação precisa aguardar um tempo DIFS mais o seu tempo de retirada Para isso, a estação que enviou o quadro aguarda um tempo (timeout) pelo aviso de recebimento do quadro por parte da estação destino. Caso esse aviso não chegue no tempo considerado, a estação origem realiza novamente a transmissão do quadro.
Para melhorar a transmissão de dados, o protocolo DFWMAC acrescenta ao método CSMA/CA com reconhecimento, um mecanismo opcional que envolve a troca de quadros de controle RTS (Request To Send) e CTS (Clear To Send) antes da transmissão de quadros de dados. Esse mecanismo funciona da seguinte forma [Soares95]:
· Uma estação, após aguardar DIFS e seu tempo de retirada aleatório, antes de efetivamente transmitir o quadro de dados, transmite um quadro de controle RTS, que carrega uma estimativa da duração no tempo da futura transmissão do quadro de dados e o ACK associado a este, além do destinatário da transmissão de dados por vir..
· A estação de destino ao receber o quadro de controle RTS acerta o seu Vetor de Alocação de Rede (NAV). O NAV especifica quando uma estação tentará acessar o meio novamente. Em resposta ao RTS, o receptot envia um quadro de controle CTS avisando que está pronto para receber o quadro de dados. O CTS informa as demais estações sobre a transmissão que vai ocorrer, fazendo com que estas também acertem seus NAVs. Agora, todas as estações estão informadas sobre a transmissão e irão esperar para acessar o meio, podemos dizer então que os sinais RTS e CTS reservam o meio para uma transmissão. Só então, a estação transmissora envia o quadro de dados após SIFS, que deve ser respondido com um reconhecimento (ack) enviado pela estação receptora.
. Neste caso, uma colisão so acontecerá se duas estações enviarem um RTS ao mesmo tempo. O RTS só deve ser usado quando temos um quadro maior, pois seu uso acarreta uma sobrecarga na rede (overhead).
O quadro RTS basicamente possui as funcionalidades de reservar o meio para a transmissão do quadro de dados, e de verificar se a estação de destino está pronta para receber o quadro de dados, sendo esta última funcionalidade devido à possibilidade da estação de destino estar operando no modo de economia de energia (modo power save).
A figura 2.5, apresenta a troca de dados para a transmissão de informações, usando o mecanismo opcional com RTS e CTS.
 | |||
| |||
Figura 2.4 – Troca de dados para transmissão de informações [Soares95, Pag 275]
1.3.2 Função de Coordenação Pontual (PCF)
Trata-se de uma função opcional que pode ser inserida no protocolo DFWMAC, sendo construída sobre uma função de coordenação distribuída (DCF) para transmissões de quadros assíncronos, e é implementada através de um mecanismo de acesso ordenado ao meio, que suporta a transmissão de tráfego com retardo limitado ou tráfego assíncrono [Soares95].
Para a integração dessas duas funções – pontual e distribuída – é utilizado o conceito de superquadro, fazendo com que o protocolo possa trabalhar de uma forma em que a função pontual assuma o controle da transmissão, para evitar a ocorrência de colisões. Para isso, o protocolo DFWMAC divide o tempo em períodos denominados superquadros, que consiste em dois intervalos de tempo consecutivos, que são usados da seguinte maneira [Soares95]:
· no primeiro tempo, controlado pela PCF, o acesso é ordenado, o que evita a ocorrência de colisões; após esperar PIFS, o ponto de coordenação dá acesso a primeira estação, que pode responder após SIFS. Depois de aguardar mais SIFS, o coordenador dá a vez para a segunda estação e assim por diante. Quando uma estação não responde após SIFS, o coordenador, aguarda PIFS e passa a vez para a próxima.
· no segundo tempo, controlado pela DCF, o acesso baseia-se na disputa pela posse do meio, podendo ocorrer colisões.
![]()
[Página anterior] [Próxima página]