Sensor Networks
Conheça mais sobre o que o futuro lhe aguarda.
Sensor Networks
Conheça mais sobre o que o futuro lhe aguarda.
Sensor Networks
Conheça mais sobre o que o futuro lhe aguarda.
Introdução

É inegável admitir que, assim como as pessoas, o mundo está cada vez mais interconectado. O avanço na tecnologia, em especial de comunicação e de circuitos integrados, tem possibilitado o desenvolvimento de muitas aplicações inteligentes, como as famigeradas Smart Cities - as cidades inteligentes - um novo conceito para a realidade urbana. Tecnologias como essa só são possíveis devido à nossa capacidade atual de monitoramento e interação com o ambiente, características estas que foram alcançadas utilizando Redes de Sensores Sem Fio (ou RSSF).
Por ser um sistema flexível e adaptável, o número de problemas complexos que necessitam de uma interface de aquisição e transmissão de dados resolvidos com a aplicação de uma RSSF é incrivelmente grande e variado. Monitoramento de áreas de risco, ecossistemas, análise de redes pública de transportes, são apenas alguns exemplos em seu vasto leque de aplicações.
Em virtude da crescente importância das RSSF, este trabalho tem como objetivo fazer uma introdução ao assunto, conceituando, motivando e abordando os principais tópicos relacionados. Com esse objetivo, sumariza-se, de forma a apresentar uma introdução ao assunto, seguida das principais aplicações da RSSF, sendo abordadas suas características gerais, sua estrutura e componentes, seus principais protocolos de operação e, por fim, estudos de caso reais.
Universidade Federal do Rio de Janeiro
Disciplina: Redes de Computadores I 2016.1
Professor: Otto Carlos Muniz Bandeira Duarte
Autores:
Gabriel Premoli Monteiro - gabrielpremoli “arroba” ufrj.br
Henrique Passos de Matos - henriquepassos “arroba” poli.ufrj.br
Jean Américo - jamerico “arroba” poli.ufrj.br
Alunos do 7º Periodo de Engenharia de Controle e Automacao
Um pouco de história
Como boa parte das tecnologias desenvolvidas no século XX, as redes de sensores também tiveram seu início como aplicação militar. Talvez a primeira RSSF que tenha alguma semelhança com o conceito atual tenha surgido na década de 50 sob o codinome SOSUS (Sound Surveillance System), uma rede de sensores submarina acústica que tinha como objetivo captar e detectar submarinos da antiga União Soviética. Essa tecnologia é ainda utilizada hoje em dia, mas para monitorar a vida submarina e atividade vulcânica [9].
Na década de 80, o departamento de defesa americano (DARPA) iniciou o programa Distributed Sensor Network (DSN) para formalmente desenvolver o campo das redes distribuídas de sensores sem fio, marco que viria a marcar como início dos avanços dessa tecnologia para o que é hoje [10].
.Conceito
Podemos conceituar uma rede de sensores sem fio (RSSF) como um conjunto de nodos, distribuídos num meio com um objetivo em comum – em geral de monitoramento ou controle de algum elemento físico, usando comunicação sem fio de curta distância (normalmente).
De maneira geral, as RSSFs podem ser consideradas um subtipo especial de uma rede móvel tipo ad hoc [10], por suas características de serem, na maioria dos casos, auto-organizadas, sem estrutura prévia fixa e de acesso sem fio.
Aplicações RSSF
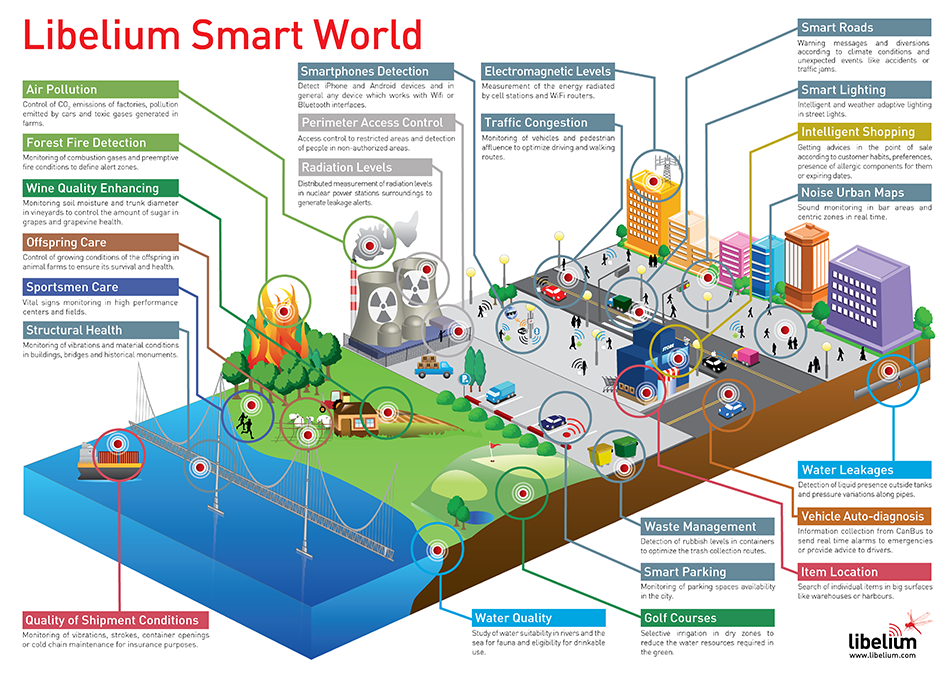
Extraída de http://www.libelium.com/top_50_iot_sensor_applications_ranking/#show_infographic – acesso em 21/06/2016.
Imagine o seguinte cenário: deseja-se prevenir incêndios florestais numa região ampla e de difícil acesso, utilizando poucos recursos e o mínimo de pessoal. Dessa forma, o objetivo é agir no menor tempo possível, assim que se detectar sinais de ocorrência. Isto pois, o fogo se espalha muito rapidamente. Esse era um desafio real para a Grécia, que em agosto de 2007 sofreu com 56 mortes decorrentes de queimadas perto de Atenas, conforme [1].
Assim como esse problema, muitos outros são, hoje, solucionados por meio e uma RSSF. Alguns dos campos de aplicação mais relevantes são destacados:
Extraído de http://www.libelium.com/libelium-images/waspmote_antiincendios/environmental_infra_sm.png – acesso em 21/06/2016.
Meio Ambiente
Como no caso de detecção de queimadas na Grécia, muitas outras aplicações envolvendo o meio ambiente são contempladas utilizando redes de sensores sem fio. Muitas delas, são caracterizadas por serem de difícil acesso, ou representarem algum risco de segurança, como no caso de monitoramento de vulcões, avalanches e deslizamentos a exemplo.
Outra importante aplicação são as redes de monitoramento e controle de poluições, sejam em cidades inteligentes, indústrias ou mesmo no oceano.
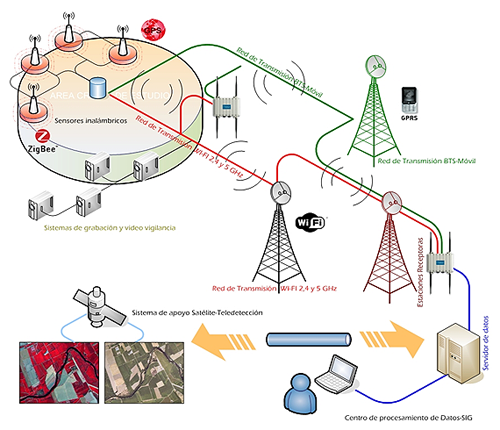
Extraído de https://www.mistralsolutions.com/wp-content/uploads/2014/05/wireless-sensor-network.jpg – acesso em 21/06/2016.
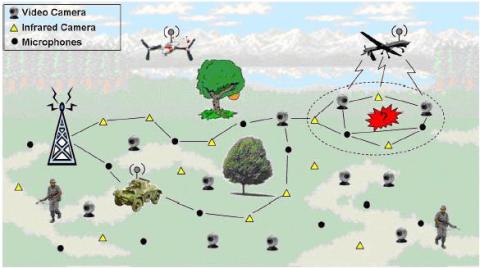
Monitoramento de área:
Pela própria natureza da RSSF, o monitoramento de vastas áreas é uma atividade comum e de muito valor. Dada sua flexibilidade, relativo baixo custo e alta eficiência, essa atividade permite monitorar regiões diversas, sejam elas muito populosas, ou de difícil acesso, obtendo dados relevantes para o objetivo desejado.
Em especial, o monitoramento de área tem aplicações militares e de segurança.
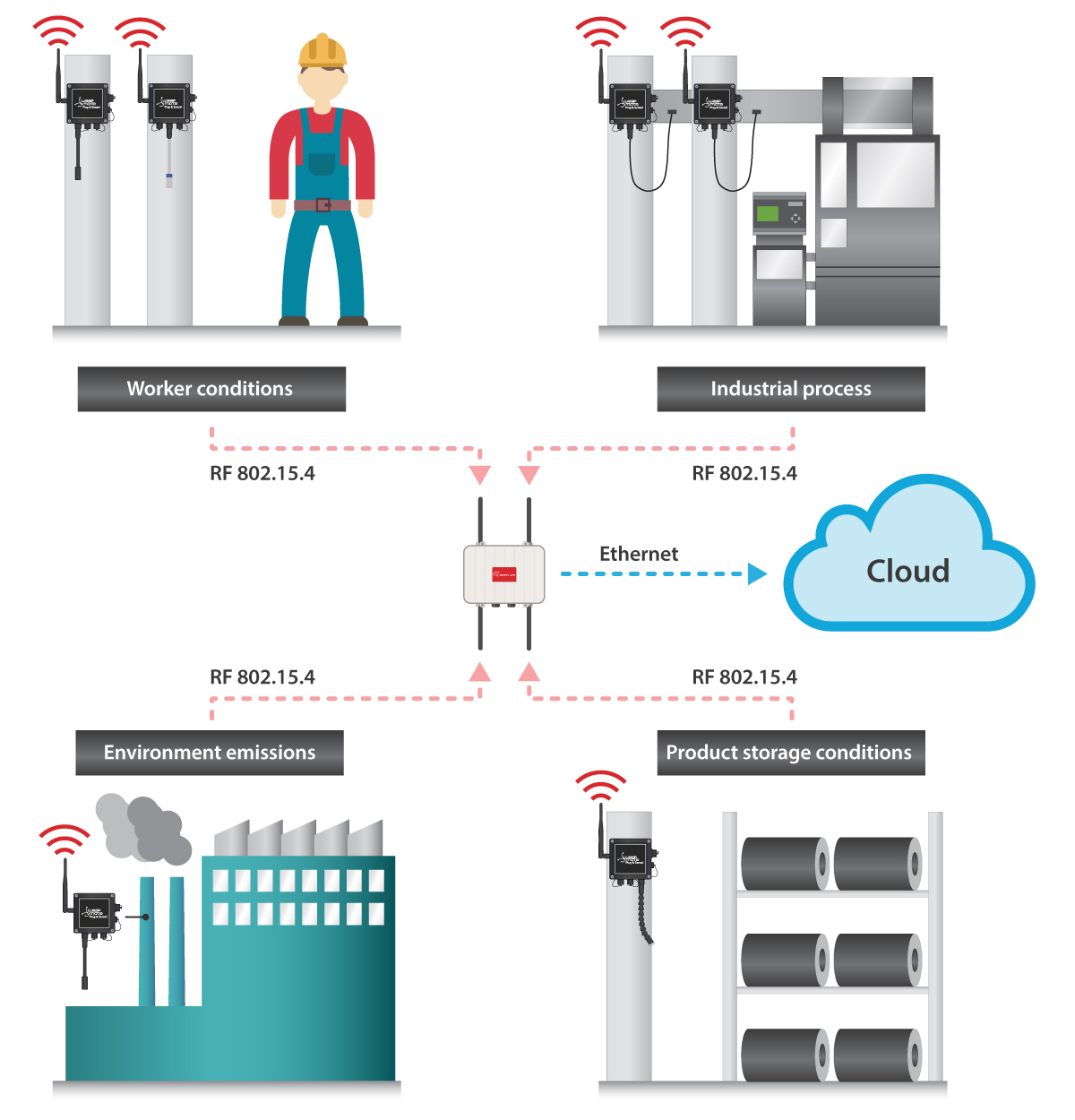
Extraído de http://www.libelium.com/wp-content/uploads/2015/02/smart-factory-libelium-diagram.jpg – acesso em 21/06/2016.
Indústria
Para o setor de indústrias, uma RSSF pode ter interessantes funções, como a de manter a qualidade do ar interna, monitorando níveis de gases que podem ser danosos para o ser humano; controle de temperatura de ambientes de refrigeração crítica, como matérias biológicos, ou grandes caldeiras; controle de processos de produção e no auto monitoramento das máquinas.
Essas aplicações têm como principais objetivos a segurança, manutenção e otimização dos processos industriais.
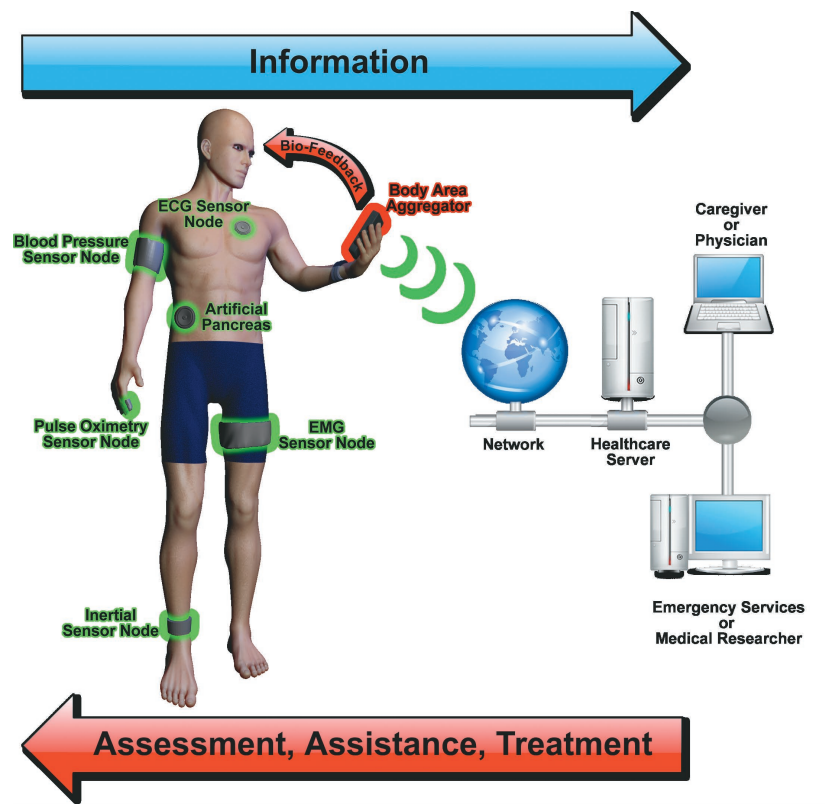
Extraído do trabalho "Rede de sensores em corpo humano e seu ambiente", disponível em http://www3.nd.edu/~dwang5/courses/spring15/papers/bsn/BSNOverview.pdf – acesso em 21/06/2016.
Medicina
Com a recorrente miniaturização dos sensores, uma das funções mais promissoras das RSSFs foi sua atuação no setor de e-Health, também conhecida como saúde digital, é a sinergia entre tecnologia de informação e protocolos de comunicação com a área de saúde.
Essa nova frente da ciência tem possibilitado o monitoramento fino de nossas atividades vitais, níveis de importantes substâncias para o corpo, ou que indiquem algum problema biológico, possibilitando a ação antecipada e tratamento.
Extraído de https://www.researchgate.net/profile/Soufiene_Djahel/publication/261309301/figure/fig2/AS:296721327378433@1447755285682/Figure-2-Scenario-illustrating-WSN-deployed-in-road-environment-for-traffic-monitoring.png – acesso em 21/06/2016.
Tráfego
Quem nunca perdeu horas a fio no trânsito? Sem dúvidas, esse se tornou um dos problemas mais comuns, quase uma rotina, na vida de muitos cidadãos pelo mundo todo. Uma solução, defendida pelas Smart Cities, se dá por meio do monitoramento constate do número de veículos e pedestres, podendo-se, assim, otimizar os tempos de sinais de trânsito, vias de acesso e afins.
De fato, as informações coletadas por meio da RSSF podem ser essenciais para o planejamento eficiente da rede de transportes das cidades modernas.
Outros
Outras aplicações existentes englobam ainda as áreas de doméstica, gerenciamento de recursos hídricos, segurança, logística e muitos outros.
Características de uma RSSF
Agregação e sumarização de dados
Fala a respeito da capacidade da rede de combinar os dados coletados pelos seus nós antes de serem enviados à estação base, assim reduzindo potencialmente, não só o número de transmissões realizadas, mas também a energia gasta nesse processo.
Mobilidade dos sensores
Nem todos os nós de sensores numa rede podem ser móveis. Algumas tem como característica terem sensores fixos num ponto, como numa estrada para o monitoramento do trânsito, enquanto outra rede, cujos sensores estão suspensos na superfície do oceano estão em movimento constante. A mobilidade dos sensores é sempre tida de acordo com o referencial em que estão coletando dados, logo, a exemplo, sensores atados ao corpo de uma pessoa para medir seus níveis glicêmicos são considerados estáticos.
Limitação de energia
Um dos parâmetros que deve ser levado em consideração quando escolhendo os tipos de sensores, protocolos de comunicação e demais variáveis para o projeto envolvendo uma rede de sensores é a limitação de energia que os mesmos serão submetidos. Isto, pois, dependo de sua aplicação, os nós ficarão em alguma região remota, dificultando manutenção. Logo, há de se ter em mente os elementos de energia que compõem a rede em questão: sua bateria, alimentação, gasto por cada elemento e subelemento (sensores, processadores, transmissores).
Auto-organização da rede
Uma das vantagens mais notáveis de uma rede de sensores é a de não possuir ponto único de falhas. A eventual perda de um de seus nós (devido à deficiência energética ou avaria), ou a instalação de um novo nó, não deve afetar no funcionamento da rede. Para isso, existe um gerenciamento automático para a organização da rede, designado por um conjunto de regras locais e globais. Isto garante que a rede seja, de fato, autônoma, eficiente e dinâmica.
Tolerância a falhas
Como falhas de comunicação e problemas com os nós da rede são frequentes, é essencial que a rede possua uma tolerância a falhas para garantir que a mesma seja confiável. Para tal, são aplicados protocolos e mecanismos de auto-estabilização de forma que sempre exista uma rota de transmissão, mesmo em situações de estresse. Não obstante, é possível que falhas agrupadas e permanentes resultem em grande perda de dados, podendo comprometer a rede.
Estrutura e Componentes de uma RSSF
Os principais componentes que formam uma rede de sensores sem fio são: nodos sensores e nodos de comunicação com outras redes (ou gateways).
Nodos sensores
Os nodos sensores são os principais componentes de uma RSSF. São neles que estão localizados os sensores responsáveis por captar dados do ambiente. Além disso, estes nodos possuem estruturas de memória, processamento, comunicação e energia a fim de serem capazes de trabalhar em cima de uma informação sensorial e transmiti-la para outros nodos. A arquitetura básica e mais comum de um nodo sensor está descrita na Figura 7.
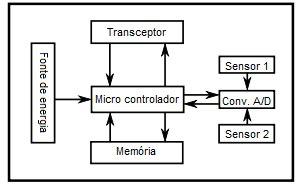
Extraído de https://commons.wikimedia.org/wiki/File:Sensornode.svg - Acesso em: 29 de junho de 2016.
Agora, serão descritas, com detalhes, as diferentes funções e tarefas que um nodo sensor assume.
Sensoriamento
A parte de sensoriamento de um nodo sensor é realizada exclusivamente pelos sensores que o compõe.
Estes sensores são os responsáveis por coletar dados quaisquer de um ambiente. Eles produzem um sinal analógico de resposta que corresponde à medida de uma variação física ambiental qualquer. Este sinal, por sua vez, é digitalizado por meio de um conversor A/D e enviado até o controlador para ser processado.
Os sensores possuem, em geral, algumas características em comum: são pequenos, consomem pouca energia, são autônomos e adaptativos ao ambiente.
Computação e processamento
A computação e o processamento englobam a memória e o controlador.
O controlador, geralmente, acaba sendo um micro controlador por este ter um preço menor, ser mais flexível e consumir pouca energia, mas também podem ser utilizados microprocessadores ou processadores de sinais digitais. As funções básicas do controlador são: processar dados advindos dos sensores e controlar a atividade de outros componentes do nodo.
A memória é utilizada para armazenar dados dos sensores ou já processados e/ou armazenar a memória de programa usada para programar o micro controlador. Geralmente, é usada uma que já venha embarcada com o micro controlador ou uma memória Flash, pelo seu baixo custo e alta capacidade de armazenamento.
Comunicação
Os dispositivos receptores e transmissores de um nodo sensor se encontram em um só: o transceptor. Este transceptor é responsável por fazer a comunicação com outros nodos sensores ou gateways.
Devido à algumas dificuldades da comunicação ótica (por lasers) ou por infra-vermelho, geralmente, são utilizadas ondas de rádio nas frequências de comunicação livres de licença. Pelo baixo fornecimento de energia à qualquer RSSF, é recomendável sempre deixar o transceptor desligado enquanto ele não estiver nem nas funções de transmitir, nem receber.
Energia
Como estamos tratando aqui de redes de sensores sem fio, redes, estas, com nodos que muitas vezes são colocados em lugares difíceis de serem alcançados, é necessário pensar em uma fonte de energia móvel e que sempre seja capaz de manter um nível adequado de força para o nodo. Geralmente, são utilizadas baterias ou capacitores. As baterias podem ou não ser recarregáveis e, hoje em dia, dispõem cada vez mais de dispositivos que se utilizam de recursos físicos para renovar a energia, como fontes solares, vibrações, etc.
Gateways
Outra parte fundamental na estrutura da maioria das RSSFs são os gateways. Estes também são nodos, assim como os nodos sensores, porém possuem uma característica e função especial, a de conectar a RSSF com algum outro elemento externo. Em geral, as RSSFs se conectam com outras redes de área local (LAN) ou redes de longa distância (WAN) de maneira a fazer com que os dados sensoriais possam ser reprocessados com mais recursos.
Protocolos
A comunicação entre nodos em uma rede de sensores sem fio é um grande desafio e seu gerenciamento será discutido agora, quando veremos os diferentes tipos de protocolos gerenciadores. Antes de tratarmos destes protocolos, vamos abordar dois conceitos de topologia de rede necessários para entendermos melhor o funcionamento das conexões em uma RSSF.
O primeiro conceito desenvolvido será o de rede ad hoc. Toda RSSF é uma rede ad hoc sem fio, isto significa que elas não possuem um elemento centralizador da comunicação. Os elementos computacionais (no caso das RSSFs, os nodos) podem trocar dados diretamente entre si, funcionando como roteadores e trabalhando de forma comunitária na comunicação.
O segundo conceito trata da transmissão multi-hop. Como, pelas próprias aplicações e limitações das RSSFs, é necessário, quase sempre, um consumo baixo de energia nos nodos, as ondas envolvidas nas comunicações não possuem, em geral, um grande alcance. Sendo assim, se torna muito difícil a transmissão entre dois nodos distantes, se fazendo necessária a propagação em vários saltos, entre nodos vizinhos, até os dados chegarem no destino final. Esse tipo de transmissão em saltos é denominada de multi-hop. Um exemplo pode ser visto na Figura 8
.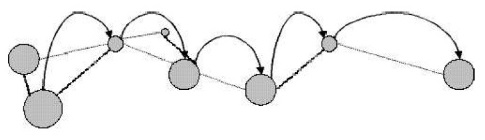
Extraído de http://homepages.dcc.ufmg.br/~loureiro/cm/docs/sbrc03.pdf. Acesso em: 29 de junho de 2016.
Entendido melhor o contexto de transmissão em uma RSSF, podemos falar, agora, dos protocolos de comunicação utilizados.
A maioria dos projetos de RSSFs são feitos utilizando protocolos de acesso ao meio (MAC, em inglês) baseados na comunicação sem fio nas próximas seções serão descritos alguns destes protocolos.
IEEE 802.11
Os protocolos IEEE 802.11 atuam em camada física, foram criados pelo Instituto de Engenheiros Elétricos e Eletrônicos com a intenção de padronizar as comunicações sem fio e são conhecidos também como Wi-Fi. Eles também são baseados numa transmissão half-duplex, over the air e com sinais modulados.
Suas variações existem devido ao aumento de utilização e, consequentemente, da necessidade de criação de novas adaptações ao padrão. Algumas dessas características, podem ser vistas na tabela 1.
| Protocolo: |
Frequência de operação (GHz): |
Taxa de transmissão (Mbits/s): |
Alcance aproximado (m): |
|---|---|---|---|
| 802.11a | 5 | 6,9, 12, 18, 24, 36, 48, 54 | 120 |
| 802.11b | 2.4 | 2, 5.5, 11 | 140 |
| 802.11g | 2.4 | 6,9, 12, 18, 24, 36, 48, 54 | 140 |
| 802.11n | 2.4/5 |
65 a 300 | 250 |
Apesar das amplas faixas de frequência, há uma alta demanda de energia o que leva o Wi-Fi ser um dos protocolos menos utilizados em redes de sensores sem fio com relação aos que serão analisados mais à frente.
Bluetooth
O Bluetooth é uma especificação de rede sem fio que visa conectar, com frequências de rádio de curto alcance, componentes que não estejam muito separados e, geralmente, de âmbito pessoal.
Este tipo de transmissão trabalha no modo full-duplex e utiliza a faixa ISM de frequência e, por isso, opera dentro do intervalo de 2.4 a 2.5 GHz. Esta faixa é aberta, praticamente, no mundo inteiro e é empregada exatamente pela vontade, por parte dos desenvolvedores, de utilização global do Bluetooth.
Uma rede Bluetooth é dita do tipo rede piconet. Isto ocorre, pois, quando dois ou mais dispositivos se conectam por meio dela, o que iniciou a conexão é denominado de mestre e os outros, de escravos. Cabe ao mestre controlar a transmissão de dados, assim como o sincronismo. Um conjunto de mestre e escravos (totalizando, no máximo, 8 dispositivos) é chamado de piconet. Os piconets ainda podem juntar-se para formar o que chamamos de scatternet. Lembrando que um escravo pode fazer parte de mais de um piconet, enquanto um mestre não. A Figura 9 nos ajuda a entender essas estruturas.
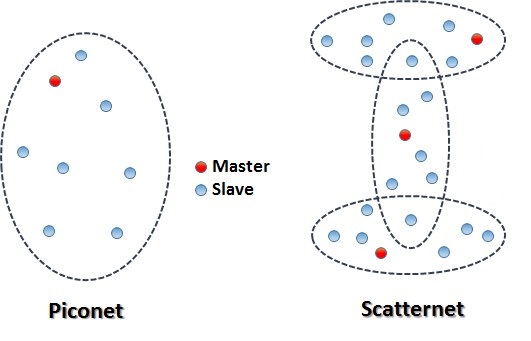
Alterada de: http://www.infowester.com/bluetooth.php. Acesso em: 06 de julho de 2016.
O bluetooth também possui um método de identificação para diferenciar dispositivos que fazem parte de um determinado piconet e permitir com que outros se incluam nele. E também possui um método de economia de energia, o qual permite que dispositivos ociosos entrem em stand-by (mesmo com esta economia, os aparelhos ainda consomem bastante energia quando em espera, até porque precisam acordar periodicamente para tomar conhecimento de uma possível tentativa de conexão).
Algo relevante também para ser comentado a respeito do Bluetooth é a existência de diversos protocolos internos para lidar com várias tarefas. Os protocolos mais importantes são, sem dúvida, os chamados núcleos ou de transporte. Estes lidam com aspectos da comunicação em si, assim como definem como é feita a conexão entre escravos e mestres e determinam fatores da radiofrequência utilizada. São divididos nas seguintes camadas: RF, Baseband, LMP, HCI e L2CAP. Ainda existem os protocolos middleware que permitem compatibilidade com aplicações que já existem e os protocolos de aplicação que possuem perfis específicos para cada tipo de dispositivo.
ZigBee
O conjunto de especificações ZigBee é o mais importante que veremos, pois é o mais utilizado em RSSFs devido à sua baixa potência de operação, baixo custo de implantação e possibilidade de implementação de redes com uma quantidade grande de diapositivos. Ele é composto por, basicamente, três tipos de dispositivos: os coordenadores, os roteadores e os end devices. Os primeiros inicializam a rede e gerenciam os outros nós. Os roteadores roteiam as mensagens para outros nós. E os end devices são os mais simples e possuem o papel único de sensoriamento e transmissão de dados. Qualquer um destes dispositivos pode permanecer “dormindo” durante um longo período, sendo que possuem um tempo de reativação muito pequeno comparado ao de outras tecnologias, o que faz das redes ZigBee ótimas economizadoras de energia.
Existem três topologias e tipos de configuração principais para as redes ZigBee, são elas: estrela, cluster tree e mesh.
A configuração estrela é caracterizada pela existência de um elemento centralizador, chamado de PAN, que atua como um coordenador para vários end devices. Cada um dos end devices possui um endereço de 64 bits que faz com que o dispositivo seja dedicado à um único PAN, não podendo ser acessado por outra rede. A Figura 10 ilustra um exemplo de estrela.
Extraia de http://www.teleco.com.br/tutoriais/tutorialzigbee/default.asp. Acesso em: 06 de julho de 2016.
As configurações cluster tree e mesh são mais complexas, podem possuir roteadores e conseguem cobrir uma grande área, devido ao grande alcance. A cluster tree, como o próprio nome diz, é uma configuração em árvore, de maneira que cada sensor só se comunica com um roteador e cada roteador possui uma única rota para o coordenador. Um exemplo pode ser visto na Figura 11.
Extraída de: http://www.gta.ufrj.br/ftp/gta/TechReports/Sergio07/Sergio07.pdf. Acesso em: 06 de julho de 2016.
A topologia mesh, também chamada de ponto a ponto, ou de malha, é a mais versátil. Ela permite com que roteadores possam se conectar com qualquer outro dispositivo na vizinhança, permitindo variados caminhos em direção aos coordenadores e uma capacidade muito maior de auto-organização da rede, essencial para RSSFs. Podemos ver um exemplo de mesh na Figura 12.
Disponível em: http://www.gta.ufrj.br/ftp/gta/TechReports/Sergio07/Sergio07.pdf. Acesso em: 06 de julho de 2016.
Com relação às redes ZigBee, ainda podemos ressaltar a forma da sua divisão em camadas. Ela é construída em cima das definições das camadas principais do padrão IEEE802.15.4, camada PHY e subcamada MAC e, além disso, inclui 2 camadas novas, como podemos ver na Figura 13: de rede e de aplicação.
Extraído de http://www.teleco.com.br/tutoriais/tutorialzigbee/default.asp. Acesso em: 06 de julho de 2016.
A camada física (PHY) diz como os dispositivos se comunicam através dos canais, além de definir as bandas de frequência de comunicação. São alocados 27 canais no padrão IEEE 802.15.4 com diferentes taxas (de 20 a 250 kbits/s) e bandas (de 0.87 a 2.5 GHz) de transmissão.
A subcamada MAC provê o acesso das informações por protocolos de camadas superiores.
A camada de rede é a responsável por inicializar uma nova rede, configurar novos dispositivos e distribuir endereços para eles.
Por último, a camada de aplicação se divide em 2 principais partes: suporte à aplicação e ZDO (ZigBee Device Object). O suporte à aplicação é responsável por descobrir dispositivos ativos na região de alcance da rede e unir dispositivos, levando em conta as necessidades da aplicação. O ZDO é onde se define a função de cada dispositivo na rede (coordenador, roteador ou end device) e o método de segurança utilizado nela.
LDWSN
Em geral, como já falado em outros tópicos, os nodos de uma rede de sensores tendem a ter capacidade de comunicação bem reduzida – em torno de 100 m – sendo um dos seus maiores limitadores. Muitas aplicações seriam deveras beneficiadas se essa comunicação fosse expandida, aumentando assim a área geográfica em que uma rede poderia facilmente ser instalada.
Felizmente, pesquisas [11][12]] indicam que é possível comunicações de alta qualidade de 600 m a 12 km entre nodos de sensores, sendo ainda eficientes energeticamente. São os chamados LDWSN (Long distances Wireless Sensor Network) – redes de sensores sem fio de longas distâncias. Isso se fez possível pelo uso de multiprotocolos de redes sem fio: 7 transdutores ZigBee/802.15.4 e uma antena de rádio SMA (com protocolos GSM/GPRS). Os pesquisadores constataram que das duas frequências de operação utilizadas para os protocolos ZigBees – 2.4 GHz e 900/868 MHz – apenas essa última foi capaz de operar bem para o caso crítico de 12 km.
TCP/IP em RSSF:
De fato, o TCP (Transmission Control Protocol) e o IP ( Internet Protocol) – ou simplesmente TCP/IP – são dois dos protocolos de comunicação mais importantes na área de redes por ser padrão em várias aplicações, incluso a Internet. Não obstante, o TCP/IP não é usado em redes de sensores sem fio. Por quê?
A maior vantagem de uma RSSF usar um protocolo com o TCP/IP seria o de qualquer nodo poder interagir com qualquer outro dispositivo que também use esse padrão de comunicação, sem a necessidade de usar um computador ou software como intermediário.
No entanto, as limitações de energia, processamento e imprevisibilidade da topologia da dada a natureza compacta dos sensores e da diversidade de aplicações fazem o uso do TCP/IP mais que um desafio, praticamente impossibilitando sua implementação.
Dentre os limitadores do TCP/IP que o inviabilizam pode-se citar o tamanho de cabeçalho, o custo do uso de dados fragmentados em pacotes, a impossibilidade de distinguir entre congestionamento e erros de bits na eventual perda de um segmento de dados (reduzindo a taxa de utilização do segmento erroneamente dependendo da tolerância em questão, isso pois em aplicações de RSSF a taxa de erros tende a ser mais elevada do que nas que TCP/IP é utilizado), necessidade de custosas retransmissões em caso de perda de pacotes entre outros fatores.
Em suma, as limitações de energia e processamento dos sensores se mostram demasiadas para que o TCP/IP seja viável em primeira análise. Em contrapartida, muito se tem pesquisado em soluções para o problema. Apesar de ainda estarmos longe do cenário em que o TCP/IP seja adotado como padrão para as RSSFs, grandes avanços já estão sendo obtidos, com técnicas mais promissoras, como o DTC – Distributed TCP Caching[5] e TSS – TCP Support for Sensor networks [4], que o tornam mais eficiente energeticamente e reduzem o número de transmissões fim-a-fim em até 70% comparado ao TCP normal, por meio de cache e transmissões locais[9].
Estudo de caso #1
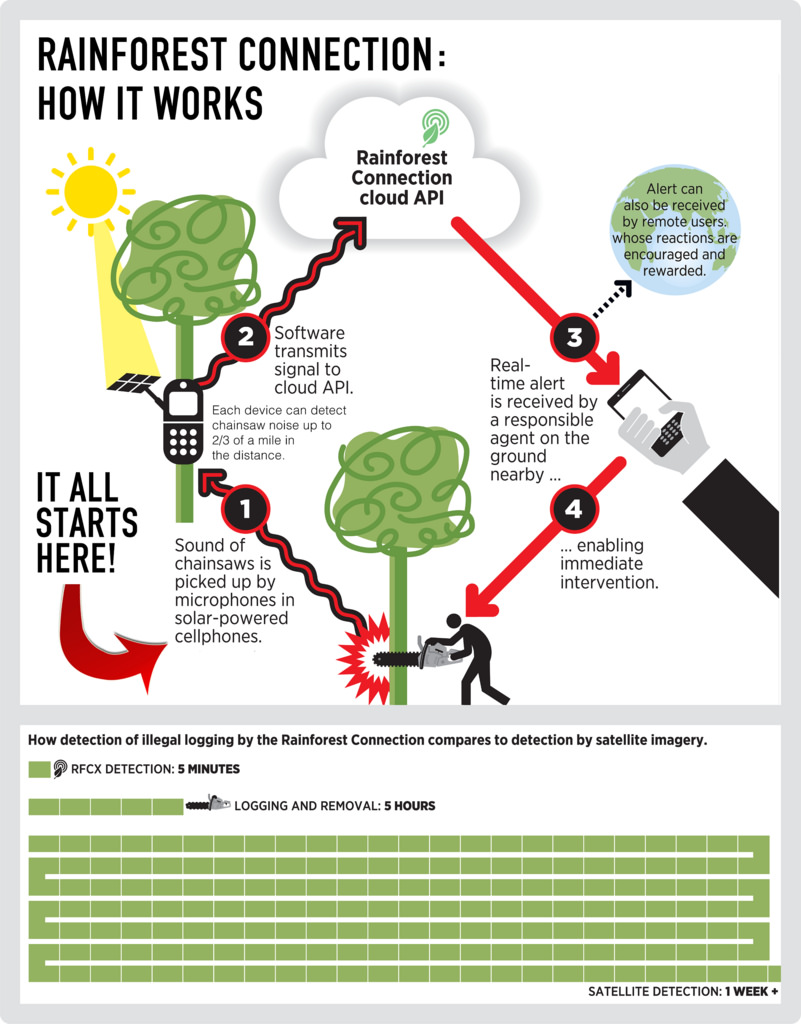
Projeto Rainforest Connection ™
Um grande desafio ecológico atual é a preservação das grandes áreas verdes. A destruição de florestas tem grandes impactos naturais, desde a mudança do ecossistema, aquecimento global e extinção de espécies. O desmatamento ilegal surge nesse contexto como uma das causas desse fenômeno.
Em situações normais, a fiscalização plena dessa atividade é muito difícil, quase inviável, dadas as dimensões das áreas que precisam de vigilância e intervenção. Uma solução inteligente e de ótimo custo foi utilizar o conceito de redes de sensores sem fio a fim de cumprir essa função desafiadora, sendo uma resposta a até então utilizada técnica de detecção via satélite.
A proposta foi feita pelo projeto sem fins lucrativos Rainforest Connection ™, que utiliza celulares antigos ou fora de uso como sensores para o monitoramento em tempo real da floresta tropical de Sumatra, na Indonésia, permitindo intervenção imediata de agentes locais.
Como explanado pela própria organização, o uso dos celulares vem como uma solução simples e barata. Mais de 150 milhões de celulares são simplesmente descartados apenas nos Estados Unidos, a cada ano [2]. Logo, a escolha de reciclar uma das máquinas mais comuns e avançadas do planeta é natural.

Extraído de http://www.libelium.com/top_50_iot_sensor_applications_ranking/#show_infographic – acesso em 21/06/2016.
Os celulares são transformados em sensores autônomos, alimentados por energia solar, conectados à central Cloud (Núvem), como os da Figura 14. O som de uma motosserra é extremamente característico, em especial num ambiente natural como uma floresta tropical, o que torna sua detecção um trabalho não tão complexo. Os sensores desenvolvidos pela Rainforest Connection ™ tem a capacidade de detecção de pouco mais de 1 km. Apenas 1 sensor produzido tem a capacidade de monitorar uma região de aproximadente 300 hectares (3 km²) de floresta.
Extraído de https://secure.flickr.com/photos/rainforestcx/14361735096/sizes/l/ – acesso em 21/06/2016.
O infográfico apresentado na Figura 15 esquematiza todo o processo envolvido em 4 passos.
- O som das motosserras é reconhecido pelos microfones dos celulares alimentados por energia solar.
- O software transmite um sinal para o aplicativo em núvem.
- Um alerta em tempo real é recebido por um agente responsável em solo, próximo ao evento.
- ... permitindo a ação imediata.
Em suma, essa é uma proposta de solução com grande potencial de salvar centenas de hectares de floresta, muito mais eficiente que a detecção via satélite até então utilizada.
Para mais informações, acesse: https://rfcx.org/
Estudo de caso #2
A Smart City de La Coruña

Extraído de http://www.linguistichorizons.com/wp-content/uploads/2013/10/coruna-arial2.jpg - Acesso em 06/07/2016.
Sem dúvidas, as Smart Cities, cidades inteligentes, tem tomado os holofotes quando o assunto é “o futuro”. Boa parte do desafio para a implementação de uma cidade inteligente é a aquisição de dados específicos, com o objetivo de se manter uma gestão ideal, o que é feito em sua maioria por meio de redes de sensores sem fio.
Um desses exemplos é a cidade inteligente de La Coruña, da região da galícia, Espanha, em implementação desde de 2011, com o objetivo de melhorar a qualidade de vida de turistas e moradores.
Para esse objetivo, uma série de redes de sensores foram instaladas na região com diversos objetivos, como:
- Melhorar a eficiência energética.
- Aquisição de dados meteorológicos.
- Controle de tráfego e smart parking (estacionamento inteligente).
- Medir a qualidade do ar e os níveis de ruído/barulho.
- Controle fino da qualidade da água e do saneamento.
- Melhor e maior interação com turistas e moradores.
Todo o sistema é centralizado pelo sistema Sofia2, o que permite não apenas o controle individual de cada parâmetro das muitas redes de sensores, mas também a análise integrada dos sistemas, por áreas da cidade, de acordo com a necessidade. Muitas dessas informações são de acesso público no site da cidade.
O sistema é multiversado em protocolos e linguagens, possibilitando que cada fragmento da rede opere em suas melhores condições, reduzindo problemas de incompatibilidade.

Extraído de http://www.libelium.com/wp-content/uploads/2016/03/case_coruna_1.jpg - Acesso em 06/07/2016.
As informações coletadas pelos os sensores são armazenadas em BigData, permitindo a análise de variadas formas (preditiva, descritiva, ...) a fim de se obter a melhor solução para cada ocasião.
Conheça mais da cidade inteligente em: http://www.coruna.es/
Considerações Finais e Perguntas
Considerações finais:
Ao longo dessa exposição, mostramos o porquê de as redes de sensores sem fio estarem tanto na moda. De fato, o número e a diversidade de suas aplicações só tende a aumentar, sendo um mercado cada mais amplo que oferece novos desafios.
Apesar de uma tecnologia muito promissora, ainda se fazem necessários avanços em outras áreas a fim de garantir a escalabilidade, a confiabilidade e a segurança nessas redes.
Perguntas & Respostas:
- 1 - Cite, ao menos, 5 aplicações de RSSF. R: Das muitas aplicações, podemos citar e-Health, meio ambiente, indústria, militar e tráfego.
- 2 - Defina nodo sensor. R: O nodo sensor é o elemento básico de uma RSSF. Ele é composto de elementos de sensoriamento (sensor), processamento (microcontrolador/ microprocessador), memória, comunicação (transceptor) e energia (bateria).
- 3 - O que significa uma RSSF ser uma rede ad hoc sem fio (MANET)? R: Resposta: Uma RSSF ser uma rede ad hoc sem fio significa que ela não possui infraestrutura. Em outras palavras, ela carece de um elemento centralizador da comunicação. Toda a transmissão entre dispositivos não precisa ser realizada através de qualquer outro componente, sendo feita de forma comunitária.
- 4 - Quais os problemas que inviabilizam o uso de TCP/IP em RSSF? R: Dentre os principais fatores, vale mencionar o tamanho do cabeçalho mínimo, o fato das aplicações convencionais de TCP/IP serem em meios de baixíssima ocorrência de erros de bits, e por isso, os problemas são de congestionamento (falta de buffer); Conquanto redes de sensores possuem uma alta ocorrência de erros de transmissão. Outro ponto é a grande demanda de recursos (processamento e energia) para o TCP/IP fragmentar em pacotes e, depois, reconstituir em mensagens; o controle de dados ser fim-a-fim, o que para uma rede com nodos é muito ruim, por não existir controle entre os nodos.
- 5 - 5. Julgue a veracidade da afirmação: “Todas as redes de sensores são caracterizadas por serem sistemas distribuídos de comunicação em curta distância”. Explique. R: A afirmação é falsa, dado que nem todas as redes são caracterizadas pela comunicação de curta distância. Existe um subtipo de RSSF, as LDWSN (Long Distance Wireless Network), que usa técnicas para comunicação entre nodo de sensores de até 12 km entre os elementos.